Пруф или я такого не говорил.
Самый крутой пешеходный навигатор — это Garmin 60Cx, остальное — компромисы.
Мне кажется, спор вполне в тему…
Кстати, вот взгляд со стороны на тему. Если у кого-то возникают вопросы «для кого это делается».
И я даже не знаю, какой русский город можно использовать как пример с хорошей пешеходной навигацией.
Я так понимаю что пешеходный принципиально отличается от автомобильного, тем что автомобильный - это рутинг по дорожному графу, в пешеходный - как бы везде, а ребра дорожного графа являются наоборот, препятствиями. Кажется что пешеход может ходить везде, где на карте нет препятствий - должен обходить домики. При этом являются ли проходными дворы - совершенно не известно.
Zkir, это только кажется. Машинам, на мой взгляд, тоже можно ездить, где угодно, и на карте надо рисовать только те места, где им передвигаться нельзя - рёбра пешеходного графа, дома, газоны…
Ну не скажи, кум ![]() Человек может ходить где угодно, по лесам, полям и даже по болотам, причем с одной и той же скоростью ~5 км/ч. Автомобиль же за пределами специально выделенных для него участков, покрытых асфальтом, резко теряет в скорости.
Человек может ходить где угодно, по лесам, полям и даже по болотам, причем с одной и той же скоростью ~5 км/ч. Автомобиль же за пределами специально выделенных для него участков, покрытых асфальтом, резко теряет в скорости.
Думаю, Котельников может это заявление успешно оспорить ![]()
Мне, например, не очень удобно ходить по газонам, проникать сквозь заборы, перебегать шоссе. Предпочитаю двигаться по тротуарам и тропинкам.
его УАЗ везде ездит одинаково медленно? :)))
угу. даже по полю идти удобнее и быстрее по тропинке/дороге, чем по пашне или траве
Вечер добый. Тут пробегали настройки для “пешеходной оптимизации” экспорта, но для старой версии osm2mp. Есть ли какие-либо ключи / настройки для новой версии. Заранее спасибо.
Нужно использовать ключи --transport=pedestrian и --nooneway.
Ограничения в секции barrier должны выглядеть так:
--- barrier
---
block: 1,1,1,1,1,0,1,1
stile: 1,1,1,1,1,0,1,1
chain: 1,1,1,1,1,0,1,1
bollard: 1,1,1,1,1,0,0,1
bus_trap: 1,1,1,0,1,0,0,1
toll_booth: 0,0,0,0,0,0,0,0
cattle_grid: 0,0,0,0,0,0,0,0
Потребуется также highway=footway включить в дорожный граф: убрать из ways-lines-navitel.yml строки
- condition:
- highway = footway
- footway != sidewalk
- area != yes
action:
- action: write_line
type: 0x16
а в ways-roads-navitel.yml заменить
- highway = path
на
- highway = path|footway
Лучше В ways-roads-navitel.yml заменить
- highway = path
на
- highway = path|footway|steps
Т.к. иначе пропадут ступеньки(а для пешехода это пригодится)
Не получается скачать файл header.tpl Его вроде как нет на странице. Что делать?
Он больше не нужен
Что я делаю не так?
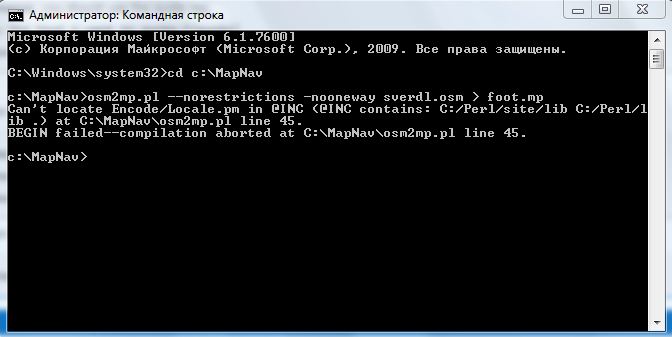
Установил модуль модуль Encode::Locale
Теперь вот что:
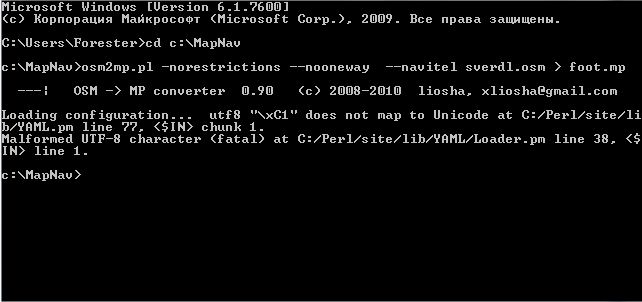
Где вообще брать файлик garmin.yml? И нужен ли он для этого случая? Если я его убираю, то тоже ничего не получается…
Forester, не надо задавать один и тот же вопрос во всех темах
Хорошо! ![]() Я просто тут заблудился) Вроде разобрался.
Я просто тут заблудился) Вроде разобрался.
…
Хотя нет… Думал, что всё из-за того, что не выполнил perl -MCPAN -e “install Math::Polygon::Tree”. Но всё осталось по прежнему.