Запустить rtknavi удалось, правда, на балконе прием довольно поганый, надо сказать.
Но последовательность действий отлажена и можно пробовать на природе.
Возник вопрос: как описывать в конфиге для rtknavi некоторые команды?
Например, я хочу вписать туда команду включения сообщений RXM-RAW.
В бинарном виде она выглядит так:
B5 62 06 01 06 00 02 10 01 01 01 01 23 DB
где
B5 62 - заголовок “UBX”
06 01 - идентификатор сообщения “CFG-MSG”
06 00 - идентификатор сообщения “CFG-PRT” длина содержимого сообщения
02 10 - идентификатор сообщения “RXM-RAW”
01 01 01 01 - маска портов USART0…2, USB “включить на всех”
23 DB - контрольная сумма
В доке по rtklib написано, что поддерживается отправка CFG-MSG таком виде:
!UBX CFG-MSG msgid rate0 rate1 rate2 rate3
Я правильно понимаю, что приведенное выше сообщение в формате для rtknavi будет выглядеть как:
!UBX CFG-MSG 02 10 01 01 01 01
? или msgid нужно писать в каком-то ином формате?
И второй вопрос: нельзя ли запихать эти настройки в энергонезависимую память или память, работающую от внешней батарейки? В настройках (CFG-CFG) есть вариант записи в EEPROM - это не позволит засунуть все туда раз и навсегда?
-1
-1
Старый мануал для antaris4 говорит
Class MsgID Rate0_USART0 Rate1_USART1 Rate2_USART2 Rate3_Reserved
Где тут USB непонятно по всем косвенным признакам Rate3_Reserved
(и зачем USART0)
USB видимо вместо Reserved. По крайней мере, так это полностью совпадает с тем, что передает u-center.
Вот тут http://diydrones.ning.com/profiles/comment/list?attachedToType=User&attachedTo=05cltxvs815q5&commentId=705844%3AComment%3A222263&xg_source=activity
упомянут, как работающий, вот такой синтаксис:
!UBX CFG-MSG 2 16 0 0 0 1
Правда, я не нашел в описании протокола что за сообщение 02 16. (Т.е. это какой-то RXM-??)
А, ну и в моем случае не особо важно, где там USB, потому что конкретно у меня с ресивера выведен последовательный порт, а не USB.
-1
В терминологии ublox EEPROM это I2C EEPROM.
Тут надо выяснить распределение и размер секций в SPI FLASH,
в первую очередь секции номер 11 (reserved), не исключено, что это как раз то, что нужно
(на ublox5/6/7 ее нет).
Сбросил файл полной конфигурации приемника EM-500 ( Скачать 1.txt с WebFile.RU ),
который можо получить из u-center Tools->GPS Configuration.
Вопрос к Alexey Illarionovy: можно скомпилировать из исходников последней бета версии RTKLib, только файл rtknavi для Windows. Похоже
уже не дождаться последней версии RTKLib.(Rtknavi.ехе всех бета версий записывает координаты базовой станций с ошибкой, может в исходниках этой ошибки нет).
Да, если в u-center в Config View в разделе CFG пометить все места куда должна сохраняться конфигурация, включая I2C EEPROM, то настройки после выключения восстанавливаются все (единственное, что я там не стал менять и оставил на инициализацию в rtknavi - это смена частоты с 1Гц на 10Гц).
А вот картинка с “учебным смыслом”:
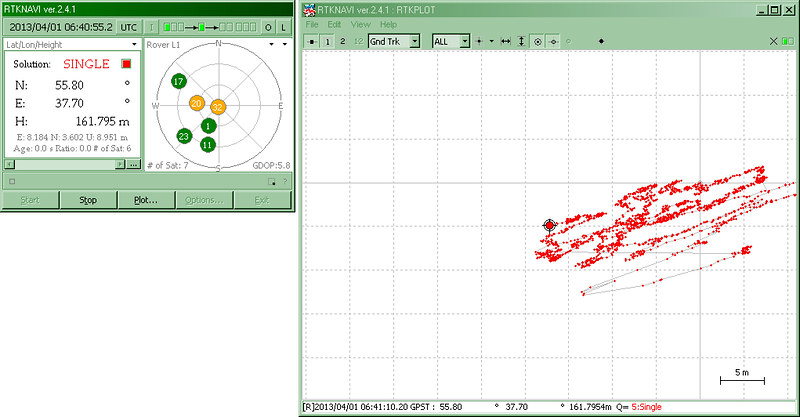
Тут четко видно, как деградирует точность в сечении SW-NE относительно сечения NW-SE, и как это коррелирует с расположением спутников. Антенна в этом случае также находится на балконных перилах, что мешает ей видеть больше половины неба.
Соответственно, раз EM-500 может хранить конфигурацию, то инициализировать его каждый раз - не нужно, т.е. с каким-нибудь OpenLog он может работать непосредственно через последовательный порт.
-1
-1
- Хм, если приемник не нуждается в отправке команд после включения (а судя по всему, после сохранения конфигурации в EEPROM это так), то зачем что-то переделывать?
- Светодиод, который показывает состояние приемника, на EM-500 предусмотрен. Вопрос только в том, что именно он показывает - в даташите написано, что он горит, когда приемник включен и не получил фикс, и мигает, когда получил. Когда припаяю - выясню, работает ли это всегда (в т.ч. при отключенных NMEA-сообщениях).
Светодиод мигает и при отключенных NMEA-msg при 3D решении. Плюс светодиода надо подключить к 3.3v, а минус светодиода к
pin4 EM-500.
umot, спасибо. Я предполагал что там ключ, замыкающий на землю, но вы опередили.