-1
В терминологии ublox EEPROM это I2C EEPROM.
Тут надо выяснить распределение и размер секций в SPI FLASH,
в первую очередь секции номер 11 (reserved), не исключено, что это как раз то, что нужно
(на ublox5/6/7 ее нет).
Сбросил файл полной конфигурации приемника EM-500 ( Скачать 1.txt с WebFile.RU ),
который можо получить из u-center Tools->GPS Configuration.
Вопрос к Alexey Illarionovy: можно скомпилировать из исходников последней бета версии RTKLib, только файл rtknavi для Windows. Похоже
уже не дождаться последней версии RTKLib.(Rtknavi.ехе всех бета версий записывает координаты базовой станций с ошибкой, может в исходниках этой ошибки нет).
Да, если в u-center в Config View в разделе CFG пометить все места куда должна сохраняться конфигурация, включая I2C EEPROM, то настройки после выключения восстанавливаются все (единственное, что я там не стал менять и оставил на инициализацию в rtknavi - это смена частоты с 1Гц на 10Гц).
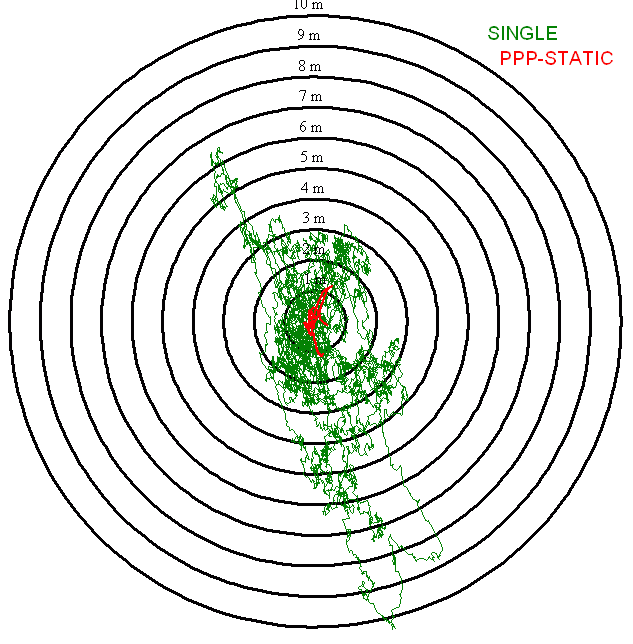
А вот картинка с “учебным смыслом”:
Тут четко видно, как деградирует точность в сечении SW-NE относительно сечения NW-SE, и как это коррелирует с расположением спутников. Антенна в этом случае также находится на балконных перилах, что мешает ей видеть больше половины неба.
Соответственно, раз EM-500 может хранить конфигурацию, то инициализировать его каждый раз - не нужно, т.е. с каким-нибудь OpenLog он может работать непосредственно через последовательный порт.
-1
-1
- Хм, если приемник не нуждается в отправке команд после включения (а судя по всему, после сохранения конфигурации в EEPROM это так), то зачем что-то переделывать?
- Светодиод, который показывает состояние приемника, на EM-500 предусмотрен. Вопрос только в том, что именно он показывает - в даташите написано, что он горит, когда приемник включен и не получил фикс, и мигает, когда получил. Когда припаяю - выясню, работает ли это всегда (в т.ч. при отключенных NMEA-сообщениях).
Светодиод мигает и при отключенных NMEA-msg при 3D решении. Плюс светодиода надо подключить к 3.3v, а минус светодиода к
pin4 EM-500.
umot, спасибо. Я предполагал что там ключ, замыкающий на землю, но вы опередили.
-1
Всей честнóй компании 150мА хватить должно, пожалуй.
Хм, а выход 1 PPS должен выдавать непрерывный сигнал вместо импульсов, когда питание есть, а решения нет?
-1
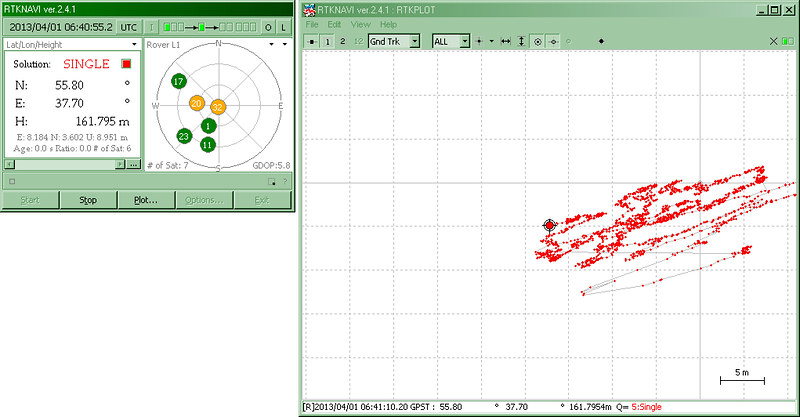
Поскольку перестал идти дождь, опробовал все в полевых условиях в single mode.
Антенна на метровом стальном ground plane, горизонт не так чтобы чистый, с одной стороны все же здание невысокое, но тем не менее - основное число отсчетов попало в шестиметровый круг, спутников было 8, средние показатели: hdop=1.3 vdop=2.1 pdop=2.4 .
Приемник завелся без отправки чего-либо на него.
Странно, на сматре gps-tool показывает ошибку 3-4 метра, и dop 1.1, врёт наверное.
Что показывают смарты и откуда они берут оценку точности - большой вопрос. Скорее всего HDOP, умноженный на константу. А может CEP50, или CEP90, или 1 sigma, или 2 sigma… И вообще accuracy != precision т.е. смарт с показаниями 3-4 метра замечательно может быть в 10 метрах от настоящей координаты ![]()
Главная разница с тем, что показывает смартфон, кроме того, что уже написал chnav, в том, что с теми плавающими координатами, которые выдает смартфон, вы уже никогда ничего большего не добьетесь.
А снятые фазовые измерения при наличии данных поправок за это же время, сгенерированных станцией в некоторой близости, можно хоть через десять лет превратить в координаты субметровой точности.
А какому режиму позиционирования rtknavi соответствует rover+correction?
А то я тут возился с rtknavi, гхм, методом не совсем научного тыка. Прописал в correction адрес FTP-сервера, который упомянут в документации ( cddis.gsfc.nasa.gov/gps/products/%W/igu%W%D_%hb.sp3.Z ). И попробовал сменить режим позиционирования на PPP Static. После чего третий индикатор входа стал светиться зеленым, потом переключился на красный. По окончании лога в статусной строке написал “(1) end (3) ftp error”, но вот rtkplot нарисовал мне в итоге совсем другую картинку, чем была раньше:
Зеленое - это Single solution, красное - PPP solution.
Число точек в получившихся кривых совпадает, кривая PPP при ближайшем рассмотрении - гладкая, без рывков.
-1