praktisch, zal men daar overheen rijden. binnenbocht draaicirkel en buitenbocht verschil.
Dat kan weer belemmerend zijn voor het recht doorgaande verkeer.
Oversteek:
Is de strook breed genoeg voor een vrachtwagen?
Waar rekent men mee. link
Vrachtwagen: spoorbreedte, 2.15 breedte: 2,55 (wettelijk maximum; voor
conditioneerde voertuigen 2,60)
Ik vroeg mij af, de auto, de draaicirkel …
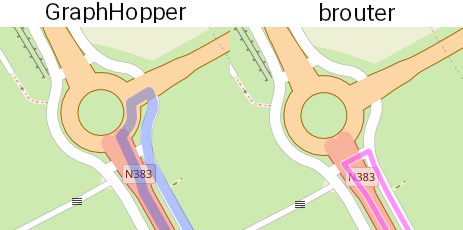
De navigatie voor de auto is wellicht bij gebruik data het meest problematisch. Ondanks dat er width:lanes op staat.
Ingelum bereiken OSM graphhopper, dit wil je niet.
De baan van een auto, buitenwiel/binnenwiel, overhang “het vegen”. Nu staat er geen bollard op hoek verkeerseiland.
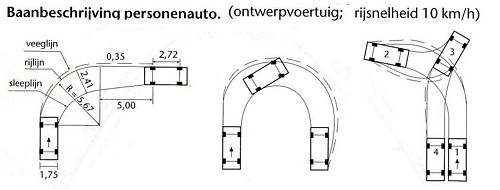
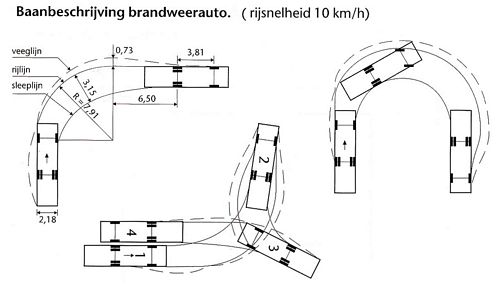
plaatje van link
bron afbeeldingen: ASVV 1996 (Aanbevelingen voor verkeersvoorzieningen binnen de bebouwde kom)
De hoek van het verkeerseiland, is dat het middelpunt van de draaicirkel? de straal zou dan zijn de breedte van de weg (max) tussen de kerbs, R=4.50 (overgang, 2 lanes, elk dan 2.25) R=4.00 (rijbaan, prov. weg)
Het binnenwiel mag niet over middelpunt cirkel (hoek verkeerseiland) heen komen.
only_straight_on @ (radius >4.00)
Hoe bepaal je max R= ?
Of moet je D= nemen ?
Hierbij ga je uit van de waarde van de situatie.
wiki turning_radius abandoned, het gaat even om de bepaling en de discussie page, argumenten.
Past het afslaan, baan voertuig, binnen de baan van het wegontwerp.
breedte, spoorbreedte, draaicirkel, wielbasis, overhang.
Lastig.