т.е. получается что большого смысла в смене 3-го серфа на 4-й и нету? а вот помехи и их значение для конечного результата - это интересно…как и в каких цифрах они оценивают помехи?удивительно!!
вот попытался запустить кинематик (по вышей ссылке с геодезиста)
но наверное с 10 (даже в режиме совместимости и запуска от админа)-она не работает?
на скрине текст ошибки
http://postimg.cc/k65DRHr9
и еще хотел спросить - серф вообще может сохранять какие-либо настройки или он кинфигурируется каждый раз?
записал 10 минутный трек,на подоконнике (он почему то сохраняется в .gps - так и надо? или в серфдемо можно выбрать формат сохранения?
на андроиде rtkgps+ - это единственная программа , которая может писать ринекс с юсб?
Кстати про 12 каналов. Где-то тут спрашивали, почему в одном месте пишет, что использует 18 спутников, а в подробном списке выводит только 12 спутников. Оказалось, что это спецификация NMEA где захардкожено не более 12 в списке.
а если писать в серфбинари ? ограничения нет ?
Ограничение 12 каналов в прошивке жесткое - размеры массивов в RAM, максимальные значения в циклах и т.д. Точка.
SirfDemo не умеет писать бинарный файл, может только воспроизводить (replay).
В приёмнике есть ионистор (суперконденсатор), который позволяет хранить настройки на протяжении 1-2 недель. В наладонниках за счет батареи, естественно, подольше. Если что-то сдохло с возрастом - ничего не поделаешь, только перепаивать.
Поэтому моя программа (которая выложане на Геодезисте) сама конфигурирует приёмник вне зависимости от текущего протокола и скорости порта - она перебирает все возможные комбинации и меняет на нужные автоматически. Под Win 10 не тестировалась.
удивительно это однако!интересно,что же я тогда записал?на nmea не похоже…
на бинарный формат - тоже…вот ссылка на гугл диск,посмотрите пожалуйста,если будет желание и возможность!
https://drive.google.com/file/d/1YeoqHLZP4gLdQuPjgxXd9mGr2ZWslRVq/view?usp=sharing
а для записи ринексов наладонник с “живой” батареей искать что-ли?
на геодезисте видел,что ктото писал rtkgps+, но с 4-го серрфа,правда.
Ему всё равно, он просто записывает входящий поток как он есть, если там белиберда, то он не сможет ничего показать только.
-то что надо,спасибо!
подметил интересную вещь:все драйвера написанные после 2012 года-не поддерживают этот приемник полностью(то не видно его вообще,то с тругольником с восклицательным знаком и ошибкой 10(запуск невозможен).старые же драйвера поддерживают его нормально,но через время(минута или чуть больше)поток сообщений останавливается и при переподключении в этой же программе уже невозможно подключиться.получается только через диспетчер устройств или перетыкнуть в юсб порте - почему такое может происходить?
p.s. RTKLib (десктоп) - не поддерживает сёрфы , а rtkgps+ вроде поддерживает,по крайней мере в меню выбора типа измерений такой пунктик есть.
применил пресловутый cmd и в u-center глянул .вроде сообщения активировались,т.к. они подсвечены черным.правильно ведь?
http://postimg.cc/ft457m1W
.
1
1
на скриншоте - это же SBAS ?
http://postimg.cc/V0gB3YNk
Телефон обновился до 11 андроид и появился доступ к антенне gps. И вот такие данные выдало
Carrier Frequency (MHz) = 1575.42
PCO Measurements:
X Y Z
PCO (mm) 1,200000 ± 0,100000 3,400000 ± 0,200000 5,600000 ± 0,300000
PCV (mm):
Elev (deg) 0 60 120 180
Azim (deg)
0 11,220000 ± 0,100000 33,440000 ± 0,200000 55,660000 ± 0,300000 77,880000 ± 0,400000
120 10,200000 ± 1,100000 30,400000 ± 1,200000 50,600000 ± 1,300000 70,800000 ± 1,400000
240 12,200000 ± 2,100000 34,400000 ± 2,200000 56,600000 ± 2,300000 78,800000 ± 2,400000
Signal Gain (DbHz):
Elev (deg) 0 60 120 180
Azim (deg)
0 9,800000 ± 0,110000 8,700000 ± 0,220000 7,600000 ± 0,330000 6,500000 ± 0,440000
120 5,400000 ± 0,550000 4,300000 ± 0,660000 3,200000 ± 0,770000 2,100000 ± 0,880000
240 1,300000 ± 0,910000 2,400000 ± 0,920000 3,500000 ± 0,930000 4,600000 ± 0,940000
Carrier Frequency (MHz) = 1227.6
PCO Measurements:
X Y Z
PCO (mm) 3,400000 ± 0,200000 5,600000 ± 0,300000 1,200000 ± 0,100000
PCV (mm):
Elev (deg) 0 180
Azim (deg)
0 55,660000 ± 0,300000 77,880000 ± 0,400000
90 11,220000 ± 1,100000 33,440000 ± 1,200000
180 56,600000 ± 2,100000 78,800000 ± 2,200000
270 12,200000 ± 0,100000 34,400000 ± 0,200000
Signal Gain (DbHz):
Elev (deg) 0 60 120 180
Azim (deg)
0 7,600000 ± 0,910000 6,500000 ± 0,920000 5,400000 ± 0,550000 4,300000 ± 0,660000
120 1,300000 ± 0,110000 2,400000 ± 0,220000 9,800000 ± 0,930000 8,700000 ± 0,940000
240 1,400000 ± 0,950000 2,500000 ± 0,960000 3,600000 ± 0,330000 4,700000 ± 0,440000
Serialized Info:
GnssAntennaInfo,CarrierFrequencyMHz,PhaseCenterOffsetXOffsetMm,PhaseCenterOffsetXOffsetUncertaintyMm,PhaseCenterOffsetYOffsetMm,PhaseCenterOffsetYOffsetUncertaintyMm,PhaseCenterOffsetZOffsetMm,PhaseCenterOffsetZOffsetUncertaintyMm,PhaseCenterVariationCorrectionsArray,PhaseCenterVariationCorrectionUncertaintiesArray,PhaseCenterVariationCorrectionsDeltaPhi,PhaseCenterVariationCorrectionsDeltaTheta,SignalGainCorrectionsArray,SignalGainCorrectionUncertaintiesArray,SignalGainCorrectionsDeltaPhi,SignalGainCorrectionsDeltaTheta
GnssAntennaInfo,1575.42,1.2,0.1,3.4,0.2,5.6,0.3,[11.22 33.44 55.66 77.88; 10.2 30.4 50.6 70.8; 12.2 34.4 56.6 78.8],[0.1 0.2 0.3 0.4; 1.1 1.2 1.3 1.4; 2.1 2.2 2.3 2.4],60.0,120.0,[9.8 8.7 7.6 6.5; 5.4 4.3 3.2 2.1; 1.3 2.4 3.5 4.6],[0.11 0.22 0.33 0.44; 0.55 0.66 0.77 0.88; 0.91 0.92 0.93 0.94],60.0,120.0
GnssAntennaInfo,1227.6,3.4,0.2,5.6,0.3,1.2,0.1,[55.66 77.88; 11.22 33.44; 56.6 78.8; 12.2 34.4],[0.3 0.4; 1.1 1.2; 2.1 2.2; 0.1 0.2],180.0,90.0,[7.6 6.5 5.4 4.3; 1.3 2.4 9.8 8.7; 1.4 2.5 3.6 4.7],[0.91 0.92 0.55 0.66; 0.11 0.22 0.93 0.94; 0.95 0.96 0.33 0.44],60.0,120.0
Есть ли знающие рассказать что тут?!?
вот что пишет сам гугл о 11 андроиде и применении необработанных измерений-
"Информация о калибровке антенны
Начиная с Android 11 (уровень API 30), вы можете использовать этот GnssAntennaInfoкласс для доступа к характеристикам антенны, таким как: координаты смещения фазового центра (PCO), корректировки изменения фазового центра (PCV) и корректировки усиления сигнала. Эти поправки могут быть применены к необработанным измерениям для повышения точности.
При использовании GnssAntennaInfoпомните о следующем поведении системы. Они предназначены для повышения конфиденциальности пользователей.
Характеристики, предоставляемые этим API, относятся только к модели устройства, а не к отдельному устройству.
Для использования GnssAntennaInfoкласса требуется ACCESS_FINE_LOCATION разрешение."
нету среди здесь программеров работащих с андроидом?
Гугл уже смогла нарисовать слово google смартфоном. По аналогу с ublox. Я так понимаю скоро получим дециметровую точность на наших смартфонах с поддержкой l5 частот. Chellenge в процессе пока.
https://developer.android.com/guide/topics/sensors/Google_Smartphone_Decimeter_Challenge_2021.pdf
https://developer.android.com/guide/topics/sensors/gnss#release
Почитал документ, соревнование по постобработке данных со смартфонов (сами тестируемые данные не обнаружены, возможно на стороннем сайте). Не понял откуда вывод про дециметровую точность. Что смог гугл и где посмотреть результат ? Т.е. они смогли сделать смартфоном постобработку типа этой ? Или даже в реальном времени ? Тема не раскрыта.
(добавлено)
А, кажется понял. В инструкции к GNSS Tool нашел тест - инженер ходит со смартфоном по огромной надписи “Google”. Потом обрабатывают разными методами. Про реальное время речь не идёт.
1
chnav, пару дней назад проехал со смартом и gps-приемником и были такие цифры
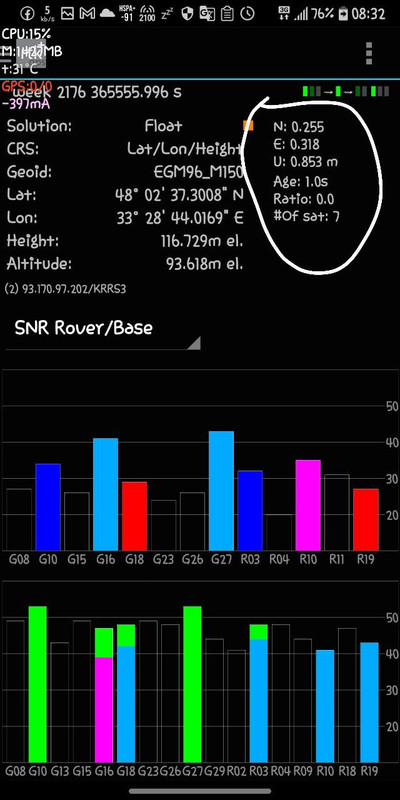
В обведенном круге
Сырые данные ртклиб конвертировать отказался…получилось их сконвертить и обработать только на Rocobun,а ринексы оттуда потом таки обработались в канадском онлайн-обработчик ! но там цифры точности(погрешности ) - более метра/двух!почему так получилось?
Так может быть из-за того,что когда производились измерения на смарте ,была подключена базовая станция ,но ее измерений ртклиб не записал и все последующие обработки (рокобун и канадский онлайн-обработчик) были без базы получается?
Или потому что в rocobun в бесплатном аккаунте результаты точности загрубляются?
Извиняюсь за сумбурный текст/вопрос ?, могу все замеры и результаты передать через гугл-драйв.
Просто оч хочется разобраться в этом!
Кто-нибудь пробовал обрабатывать rinex, записанный смартфоном через GnssLogger App или GNSS/IMU Logger? я сколько ни бился, какая-то шляпа получается. точность в лучшем случае ± 50 метров, и что с базовой станцией, что без - разницы нет. Может кто-то сумел получить результат получше?
Добрый день,
пытаюсь воспользоваться функцией postpos. На тестовых данных rtklib/test/data/rinex/30400920.05o, /30400920.05n, /07590920.05o все работает. Получаю выходной файл с уточненной позицией и точностью порядка дм. Используя собственные данные, на выходе не получаю ни одного решения, даже float. На вход функции подаю файлы rover.21O, base.21O, base.21N, base.21G. Файл rover.21O генерирую функциями outrnxobsh, outrnxobsb.
Заголовок и первые две секунды измерений:
Ровер
2852247.5969 2205206.3629 5260286.4301 APPROX POSITION XYZ
0.0000 0.0000 0.0000 ANTENNA: DELTA H/E/N
1 1 WAVELENGTH FACT L1/2
6 C1 L1 P1 C2 L2 P2 # / TYPES OF OBSERV
1.000 INTERVAL
2021 10 1 14 29 18.0000000 GPS TIME OF FIRST OBS
2021 10 1 14 56 59.0000000 GPS TIME OF LAST OBS
END OF HEADER
21 10 1 14 29 18.0000000 0 7G 2G 6G 7R 8R 9G11G26
23982843.506 -102510.776
24186408.065 140809.614 24186414.827 103902.634
20949014.877 -552190.673 20949014.231 -412176.773
19573342.174 -23252.213 19573341.010 -15339.093
19573351.776
21809271.936 179007.223 21809272.626 118750.122
21809280.726
23005718.873 -55404.615 23005731.787 -40383.240
24063370.913 25550.438 24063393.084 17934.427
21 10 1 14 29 19.0000000 0 7G 2G 6G 7R 8R 9G11G26
23982705.800 -103240.937
24186612.199 141883.056 24186618.654 104739.106
20948242.293 -556251.256 20948241.839 -415340.859
19573311.727 -23412.183 19573310.373 -15463.512
19573321.783
21809544.225 180477.861 21809549.986 119893.934
21809558.906
23005644.469 -55792.831 23005657.602 -40685.749
24063529.339 26379.955 24063547.897 18580.779
База
2846203.0412 2200538.4655 5249212.5801 APPROX POSITION XYZ
0.0000 0.0000 0.0000 ANTENNA: DELTA H/E/N
1 1 WAVELENGTH FACT L1/2
6 C1 L1 P1 C2 L2 P2 # / TYPES OF OBSERV
2021 10 1 14 21 39.0000000 GPS TIME OF FIRST OBS
2021 10 1 15 47 2.0000000 GPS TIME OF LAST OBS
END OF HEADER
21 10 1 14 21 39.0000000 0 11G 6G 7G 2R 8R 7R 9E 7E30C27C22C21
24188663.617 127112284.726 24188675.961 99048576.678
24188675.203
21422495.023 112575968.128 21422500.082 87721550.881
21422499.563
24155160.320 126936220.514 98911361.833
24155164.953
19696326.188 105472936.233 19696325.297 19696332.129 82034542.152
23235462.523 124381201.356 23235461.797 23235475.250 96741016.939
21781678.023 116312958.431 21781677.117 21781685.289 90465683.501
24175893.836 127045180.171
25290286.266 132901355.171
138020895.107 26505463.984 138020895.107
130762416.693 25111546.117 130762416.693
115034019.238 22091074.945 115034019.238
21 10 1 14 21 40.0000000 0 11G 6G 7G 2R 8R 7R 9E 7E30C27C22C21
24189268.250 127115464.267 24189281.066 99051054.246
24189280.238
21422106.203 112573926.531 21422111.766 87719960.027
21422111.105
24155397.750 126937467.014 98912333.132
24155402.016
19696662.391 105474728.696 19696659.887 19696667.297 82035936.337
23236213.648 124385220.087 23236212.359 23236225.531 96744142.606
21782335.281 116316475.858 21782335.582 21782343.367 90468419.294
24175616.844 127043724.884
25289713.469 132898344.036
138019410.809 26505179.055 138019410.809
130765628.456 25112162.805 130765628.456
115034955.065 22091254.703 115034955.065
Судя по trace основные проблемы это “point pos error (chi-square error nv=8 vv=155.7 cs=10.8)” (nv, vv, cs значения как пример),
“point pos error (lack of valid sats ns=4)”. Последняя ошибка возникает, из-за того что некоторые спутники исключаются (outlier rejected (sat= 9- 7 L1 v=-1970460.469) (значение v как пример)).
Подскажите, пожалуйста, где проблема? Сравнивая тестовые файлы измерений и свои собственные не могу найти недочётов в своих.
Неудивительно для подоконника. На улицу выйдите и будет счастье.
Спасибо, что ответили.
Проводил измерения под открытым небом ранее, но ситуация, к сожалению, была похожая. Основная ошибка была “point pos error (chi-square error nv=x vv=xxx.x cs=xx.x)”. Так понимаю, в процессе решения на этапе проверки гипотезы по критерию хи-квадрат отбраковываются полученные невалидные результаты. В официальном разделе issure на github тоже настаивают на “плохом небе”. Могут ли быть другие причины?
Также, насколько я помню, для алгоритма LAMBDA решения фазовой неоднозначности необходимы измерения по минимум 6 спутникам. Собственно, при запуске программы с тестовыми измерениями количество ns=6 или ns=7, при этом значится fix решение.
В моих файлах присутствуют измерения по 6 и более спутникам, но при этом идет отбраковка по хи-квадрат.