т.е. M8T войдет на BN-220 флэш размеров 512 Кбайт ? FW M8P rover/base скачал с ublox, где можно взять FW M8T ?
Хорошо, если так, я ориентировался на описание продавца на Али. В одном из описаний была табличка по BN модулям 180, 220, 800, … и напротив 220 стояло, что антенна пассивная.
“панорамный анализатор КСВ” звучит для меня как, что-то сверх технологичное и недоступное
https://habr.com/ru/post/467999/
Цена на Али около 3000р. (вот только экран и шрифты у оригинала очень мелкие). Ещё в 2019 его диапазон расширили до 1500MHz, полагаю с тех пор менялись прошивки.
NanoVNA (я его имею) реально прибором является до 300 МГц выше даже на балалайку не тянет
использовать NanoVNA V1 на 1575 МГц можно и не пробовать, это ничто на этой частоте
по заявленным параметрам подойдет NanoVNA V2 Plus4
однако их пока нет в продаже на Али
поэтому по прежнему пользуюсь Р2-78 Измеритель КСВН и жду появления в продаже на Али NanoVNA V2 Plus4
а зачем вам FW от M8T ? это FW уже внутри BN-220
BN-220 от M8T отличается только несколькими БИТАМИ (не байтами) в eFuse (однократно прожигаемые)
которые хранятся не во флэш.
К чему тогда эти советы по самодельным антеннам, если обычному пользователю такое оборудование недоступно. Приведи лучше рабочий и реализуемый на коленке вариант со стабильным фазовым центром. Конечно если таковые имеются.
затем что** эта антенна гораздо круче антенн купленных за штуку баксов**
тогда как Р2-78 Измеритель КСВН сейчас при желании можно купить и за 500 баксов
многокилобаксовые антенны со стабильным фазовым центром для измерения миллиметров реально измеряют
намного хуже, причем миллиметрами и не пахнет что я уже показывал здесь несколько страниц назад
тогда как изготовленная из подручных материалов и настроенная по прибору дает фору Choke ring
Ты эти байки кухаркам рассказывай, так же как про одночастотный RTK.
Твои картинки с PPP уже порядком утомили, перепечатываешь их на каждой странице. Кому вообще на практике нужен post-processed PPP (без какого-либо контроля качества), если можно взять несколько ближайших станций и обработать в кинематике. С анализом сети, оценкой ошибок и т.д.
входное сопротивление четверть волновых стаканов Choke ring
гораздо больше 377 Ом волнового сопротивления пространства и все что упало
на круг с Choke ring, несмотря на заверения продавцов, будет отражено синфазно
т.е. зачем повара ставят Choke ring спецам непонятно
на этой странице ни одна картинка не имеет ни малейшего отношения к PPP
Ok, my bad, это автономка… Я увидел очередные весёлые картинки без описания методики и не стал разбираться. НО т.к. я давно живу на этом свете и с GPS работаю не один десяток лет, то в чудеса не верю, а значит всему найдётся разумное объяснение. Отсюда уточняющий вопрос: относительно чего нарисованы scatter plot - точных координат ITRF или среднего значения ?
(added)
Вижу на последнем графике STD и RMS совпадают, т.е. от среднего… Копаю дальше… нет данных по длительности сессии и интервале записи у каждого испытуемого - картинка и статистика от этого очень зависят…
(added)
Не нахожу в RTKLib опцию “Carrier-smoothing of code pseudoranges”, без неё нельзя сравнивать сглаженные дальности uBlox с реально сырыми C/A Trimble, Ashtech и пр. Влияние антенны в данном случае просто не видно.
Такая библиотечная функция есть, но она нигде не используется.
Ипонский товарисч IMHO целенаправленно саботирует конечного пользователя.
qt5-приложение угробил, rtkgps+ не интегрировал.
И как это чудо техники прикрепить на крыше у машины ? И что будет с ним если ехать быстрее 200 км/ч ?
Вообще как оказалось автомобильная трехчастотная антенна для F9 это очень большая проблема.
(Backfire-resonant-quadrifilar-helix-antenna-popular-for-GNSS-communications) наверно можно и сделать, и прибор КСВ можно попробовать найти у друзей радиолюбителей должна быть такая техника. Правда не представляю как производить настройку такой антенны … изменять геометрию ? Читал, что LNA должен располагаться максимально близко к антенне, чтобы уменьшить кол-во шумов в кабеле, где в такой антенне LNA ?
Такой вопрос - например антенна GPS/GLONASS MG-411M с LNA - расположенная на металлическом блюдце - на сколько хуже будет (не знаю как сравнить) чем “quadrifilar-helix” ?
если бы это было действительно так то вам бы не составило особого труда
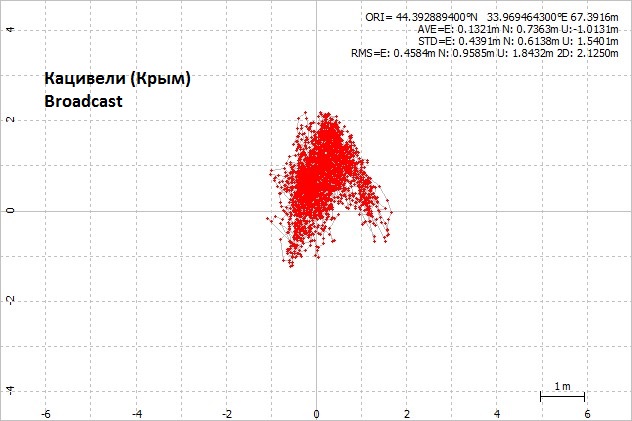
понять что Кацивели это KTVL и её ринех файлы доступны каждому
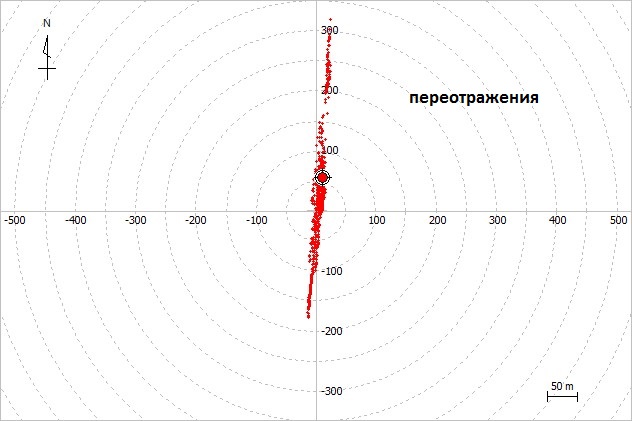
именно с KTVL где установлена “крутая” антенна и приемник я и сравнивал свое “рукоделие” при одинаковых условиях обработки в RTKLIB
по этим картинкам несложно заметить что “рукоделие” ничем не уступает “крутым” и даже у них выигрывает
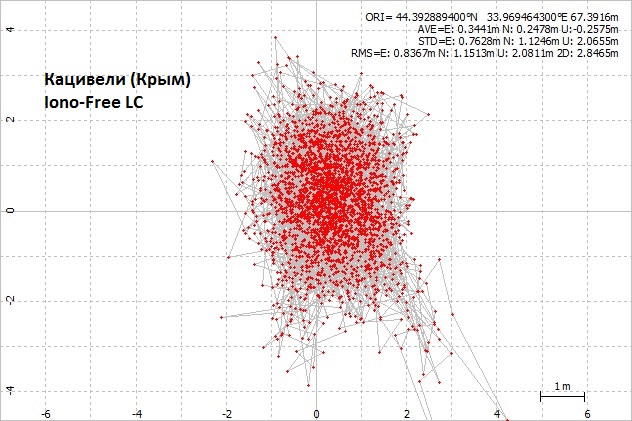
единственное что не может “рукоделие”, поскольку не имеет L2, это изобразить Iono-Free LC
а ведь именно при Iono-Free LC пятно наблюдений резко увеличивается, хотя по заверениям знатоков исключив влияние ионосферы следовало бы интуитивно ожидать уменьшение этого разброса.
именно такое странное поведение Iono-Free LC и есть мой интерес а не какие то там геодезические измерения
такие антенны давным давно серийно производятся, как правило используются на яхтах и кораблях ВМФ.
на крышу авто в защитном корпусе её можно прицепить но смотреться там будет конечно ублюдочно
но здесь приходится выбирать или или …
поскольку я занимаюсь исследованиями тропосфера + ионосфера то кроме этой антенны ничего более приемлимого пока не обнаружил,
все остальное или вообще не умеет принимать только правостороннюю круговую поляризацию при этом прилично подавляя отраженные сигналы с левосторонней поляризацией или принимают со стороны подстилающей поверхности в силу своей симметрии.
покупайте и используйте
с моей точки зрения это вообще антенной называться не может, особенно для GLONASS.
причем еще надо проверить на приборе действительно ли она настроена для приема GLONASS
очень часто сейчас китайцы продают такие антенны но реально они настроены на GPS и бейдоу.
настройка на GLONASS керамического резонатора изготовленного для приема GPS состоит в рукопашном
подпиливании одной из сторон или уголков и т.д. такие антенны в GLONASS и бейдоу принимают ИСКЛЮЧИТЕЛЬНО линейную поляризацию и как правило в GPS тож
это правильно
но лично я не стал выковыривать LNA с фильтром с активной антенны а просто взял
хороший посеребренный фторопластовый коаксиальный кабель,
для наблюдений на открытом пространстве уровня сигнала при этом более чем достаточно
По учебникам Iono-Free используется в режимах с базой (первые-вторые разности) и PPP. Предполагаю, что коррекция ионосферы методом Iono-Free при автономном решении - это экспериментальная фича RTKLib. Ты показал, что не надо её использовать в Single решениях, спасибо, но антенна тут не при чем.
Зашел на сайт, скачать без установки дополнительного ПО нельзя, может ещё и регистрация понадобится.
У меня рядом IGS станции Менделеево, Звенигород и Обнинск, последние две дают скачать секундные RINEX. Если найду тулзу для сглаживания дальностей - испытаю автономное решение. У автора RTKLib вроде есть такие утилиты, но требуется установка Matlab. Лень ставить дополнительное ПО ради запуска одной утилиты.
а зачем делать сглаживания дальностей при исследованиях?
так можно выгладить всё что интересно
это отчасти оправдано только при геодезических съемках.
что необходимо для исследований в RTKLib есть всё
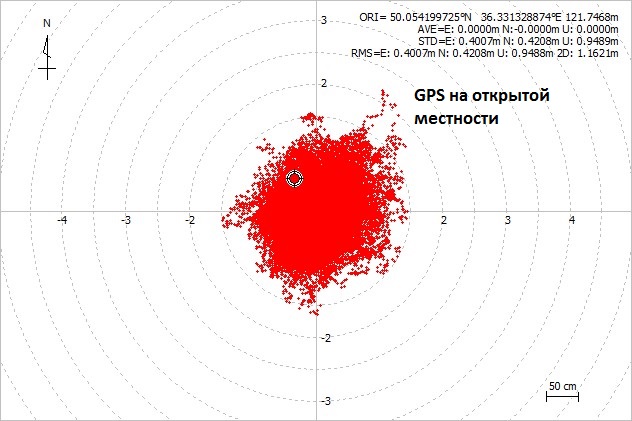
например, если говорит ** no nav data**, как у предыдущего оратора
то можно элементарно изменить настройки Kalman фильтра и тогда бы оратор на прекрасный приемник с чудесной антенной
увидел вот такую картинку, которая вряд ли бы его удовлетворила
оплевал и растоптал (смотреть Рис.6 по Рис.14) всю мировую науку об ионосфере
причем преподы-доценты в казанском универе даже этого не заметили
тренды на Рис.6 по Рис.14 ** РАЗНЫЕ**
а должны быть ОДИНАКОВЫЕ
надо сказать что подавляющее большинство авторов учебников на уровне научпопа
не имеет ни малейшего понятия как реально работают GPS приемники и несут такую отсебятину что …
но не будем о грустном ибо это ничего не изменит
а зачем делать сглаживания дальностей при исследованиях?
так можно выгладить всё что интересное
это отчасти оправдано только при геодезических съемках.
когда съемку выполнить необходимо даже путем таких извращений
ибо я не знаю ни единого приемника, включая самые простые u-blox за 4- 10 баксов
где бы использовались выдуманные кодовые измерения
в терминах научпопа все известные мне приемники работают исключительно в режиме фазовых измерений
здесь уже то что упоминал по поводу качества учебников
затем что ты сравниваешь самопальную антенну, прикрученную к сглаженным данным uBlox, с тримбловскими несглаженными данными, прикрученным к choke ring. Т.е. жопу с пальцем. Очевидно что с uBlox ты не можешь вытащить несглаженные данные (т.е. конечно можешь, кардинально изменив прошивку), поэтому чтобы хоть как-то корректно сравнивать надо подогнать данные тримбла под стандарты бытового чипа, т.е. сгладить.
Мдэ… А псевдодальность это что по-твоему )))) В просторечии - кодовая дальность и есть (фаза кода C/A переведённая в псевдодальность). Carrier Phase (aka Integrated Doppler) в автономном решении используется только для сглаживания дальностей т.к. в автономном режиме НЕВОЗМОЖНО решить неоднозначности по фазе.
Наконец-то !!! Компания Trimble согласна с тобой !!! Пусть пользователь/исследователь получит максимально необработанные сырые данные и сам решит, сглаживать ли их или нет. А бытовые чипы сглаживают внутри firmware и дают тебе ванильную картинку.
PS: естественно готовые координаты из проф.приёмника (NMEA) могут быть и сглажены, и с разными настройками Калмана. Но мы же говорим о сырых данных из RINEX.
и я ж о том
вести разговор с челом который верит в выдуманные кодовые измерения это напрасная трата времени
это обычный бред барыг которые выдумали кодовые измерения
реально pseudorange у всех GPS приемников “фазовыми” измерениями определяется 1000 раз за сек
в зависимости от темпа вывода будет окно усреднения, если у u-blox 10 выводов за секунду (а именно так я снимал)
то это усреднение 100 отсчетов, собственно этот алгоритм реализован у всех без исключения GPS приемников
хотя бывают “крутые” GPS приемники которые халтурят, т.е. дополнительно фильтруют, причем непонятно зачем
типичный пример такого “крутого” GPS приемника с доп. фильтрацией
доп. фильтрацию сырых данных наглядно видать
такой халтурой занимается LEICA GR10
что, так запущено ?
в RTKLIB кстати Doppler совершенно не используется, от слова совсем
за сим гуд бай ибо мне разговаривать с чел. который верит во всякие сказки научпопа и барыг не интересно