-TADJ возник давным давно не на пустом месте так как у antaris4 были отклонения и на 8 миллисекунд,
для 5,6,7,8 железо допускало только отклонение на 1 миллисекунду,
а вот 9 опять плывет до 5 миллисекунд.
sirf естественно тоже подвержен этой проблеме.
Программная реализация -TADJ довольно глупая (sscanf для каждого UBX пакета, большая радость на 20Hz).
Если RTCM пакеты генерируются чипсетом, то их надо править перед отсылкой,
также как это реализовано для TRK-MEAS.
Прилагаю скрин файла
Прошу взглянуть.
Время плавает ± 0,003
Как с этим боротся?
У меня вроде оригинал. Покупал тут - https://www.gnss.store/gnss-gps-modules/99-ublox-zed-f9p-rtk-gnss-receiver-board-with-sma-base-or-rover.html


Это нормально, у Сёрфа вообще 0.0 - 0.150 )))
Это всего-лишь внутренние часы. Есть два варианта сохранения ринекса - сырые данные, как их снял приёмник (ваш случай) и причёсанные, т.е. поправленные на уход часов.
При обработке бинарного потока можно вытащить dT из навигационного решения и поправить время, псевдодальности и фазу на это же значение перед записью в RINEX, естественно переведя в соответствующие единицы измерения - метры и фазы. Скорее всего в этом случае получится время, синхронизированное с GPS, т.е. с нулями в дробной части.
Спасибо за ответ.
Вернусь к своей изначальной проблеме о которой я писал ранее.
Почему пропадает коррекция на Trimble ровере от базы на F9P?
К чему такие симптомы?
Период пропадания коррекций подозрительно похож на поведение сёрфа, что в своё время доставило мне кучу хлопот. Встроенные часы дрейфуют (и в uBlox, и в Тримбле), чтобы оставаться в заданных пределах регулярно поддёргиваются. Например я видел у некоторых плат Trimble от -0.5 мсек дрейфует в сторону 0.5 мсе, как только достигается это значение - дёргается обратно на -0.5. Это не страшно т.к. момент измерения всё-равно синхронизирован с GPS, но вот некоторым программам это не нравится, происходит срыв инициализации.
Посмотрите в своих ринексах не совпадает ли время сбоя коррекций с моментом перехода часов от +3 мсек обратно к -3 мсек.
Потому что геодезические приемники стараются синхронизировать свои внутренние часы
с GPS (VCO=VoltageControlledOscillator), у ублокс это умеет только LEA-M8F.
Trimble очевидно не любит отклонение меток от “стандартных” значений.
Поменяйте CFG-RATE с 1000 на простое число миллисекунд,
получите эпические практически псевдослучайные временные метки (в RXM-RAW, не смотрел в MSM7),
и увидите как реагирует Тримбл на такой поток данных.
https://cddis.nasa.gov/Data_and_Derived_Products/GNSS/broadcast_ephemeris_data.html
Anonymous ftp service will be discontinued on October 31, 2020.
ftp это зло! Переходите на https. Кстати еще один action item для rtklib.
Сегодня впервые поймал “Луч” на SirfStar III. Неплохо для прошивки 3.2.4 2006 года. С тех пор код SBAS в прошивке, судя по косвенным признакам, не менялся, а в v3.6.0 его вообще убрали для освобождения флеша под нужды Extended Ephemeris.
Пропатчил приёмник ещё неделю назад, “Луч” иногда выскакивал в переборе спутников с уровнем примерно 22-24 dBHz и сразу исчезал. Также иногда появлялса SBAS 126. А сегодня с удивлением обнаружил, что SV 140 принимается и используется в навигационном решении, уровень 40 dBHz.

Я всю неделю расшифровывал подряд все функции, которые хоть как-то связаны с декодированием SBAS, а, видимо, сигнала не было или очень слабый.
Учитывая возраст, в прошивке отведено место только для 8 спутнков SBAS, из них на сегодня полуживы три - японский 129, американский 138 (planned decommission in 2020) и европейский 126 (status: testing).
Планирую заменить эту таблицу на 8 живых спутников, которые хотя бы потенциально могут приниматься/тестироваться на территории России.
В сёрфе нет принудительного выбора конкретного спутника SBAS. В бинарном протоколе есть соответствующие команды, но код не реализован.
RTCM тоже не реализован, но вполне возможно он был в ранних прошивках.
в EGNOS сейчас реально работают 123 и 136
причем 136 частенько выключается на несколько часов
Отправьте и мне, пожалуйста)
отправил
Задолбался я с нашими Лучами, PRN 140 вообще не ловится ни в какую уже неделю, а PRN 125 не берётся в обработку. Что-то у меня скепсис появился с этими SBAS-ами. В общем ловится всё что угодно - разные EGNOS, индийский GAGAN, но только не наши Лучи.
Сегодня тестировал в поле, в автономке 10-11 спутников, а когда цепляется к EGNOS 123 то остаётся 8-9 (разные созвездия), при этом позиция заметно ухудшается. Понятно что надо использовать свою региональную систему, а она не пойми в каком состоянии, то-ли работает, то-ли не работает. Информации по ним на сайте СДКМ нет вообще, словно не существуют.
Вот у IGS существует корректирующая информация через поправки RTCM3EPH, правда там только по GPS насколько я понял. Может есть аналог для всех систем?
Некоторое время я проводил измерения с помощью sirf и увидел, что при преобразовании из Sirf в rinex Mid28 и Mid7 используются для расчета псевдодальности, фазы и других параметров. Но в Mid30 есть поправка на ионосферную задержку, которую я не вижу, чтобы она учитывалась.
Может ли это повлиять на обработку?
Это стандартная модель, эти цифры можно и без sirf посчитать.
Хочу поделиться результатами испытаний такого дешевого приемника с алиэкспресса - китайского клона M8N.

Собрал на его базе простой логгер при помощи одноплатника Orange pi zero. Лог пишется с использованием str2str, пользовался при создании мануалом от rtklibexplorer.
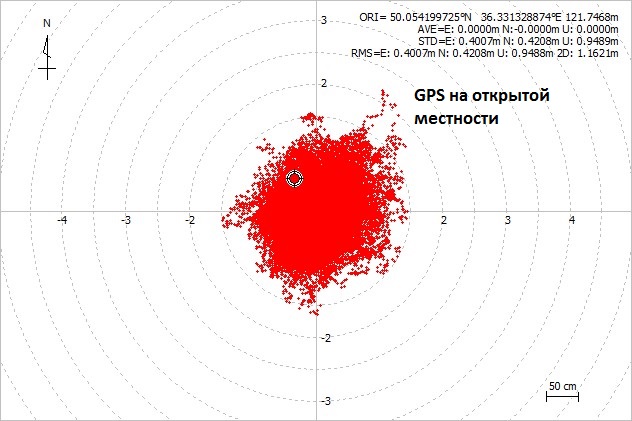
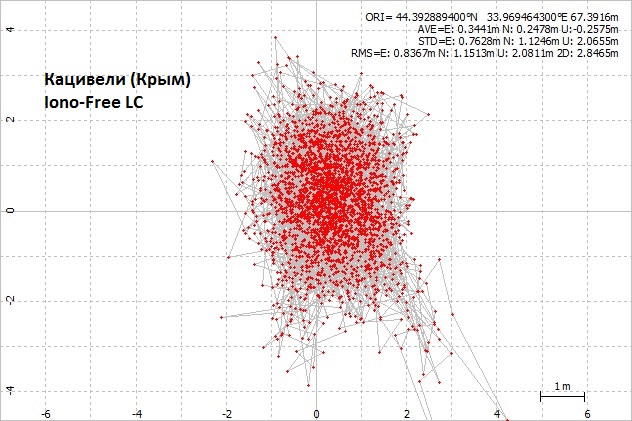
Была выполнена поездка на машине продолжительностью около часа с несколькими длительными остановками. Приемник находился на торпедо под лобовым стеклом. Были участки с 5-этажной застройкой и полностью открытые.
Получаются такие результаты:


Видно по результатам, что фиксированное решение около 50% трека наблюдается только в местах остановки и в местах с замедленным движением. Результат не очень впечатлил, потому что ранее, на китайском старом одночастотном приемнике (типа геодезическом) S750, но с антенной-тарелкой - получал 100% фиксированного решения и двигался при этом с гораздо большими скоростями.
Вопрос: как улучшить качество принимаемого сигнала? Можно ли к нему приколхозить внешнюю антенну, если разъем для нее отсутствует и сам чип скрыт под экраном?
чудесный приемник всего за ~10 баксов ![]()
работает лучше чем приемники геодезического класса, многократно проверял
антенну, которая приклеена двухсторонним скотчем (даже не имеет второго контакта)
естественно надо убирать и подпаивать коакс. провод для внешней антенны.
к этому приемнику можно подключить и USB разъем
Ну сколько можно…
а почему бы и нет ![]()
тем более что это может проверить каждый в любое время
например
это же ужас с геодезического класса ![]()