Гироскопия и навигация 2020.
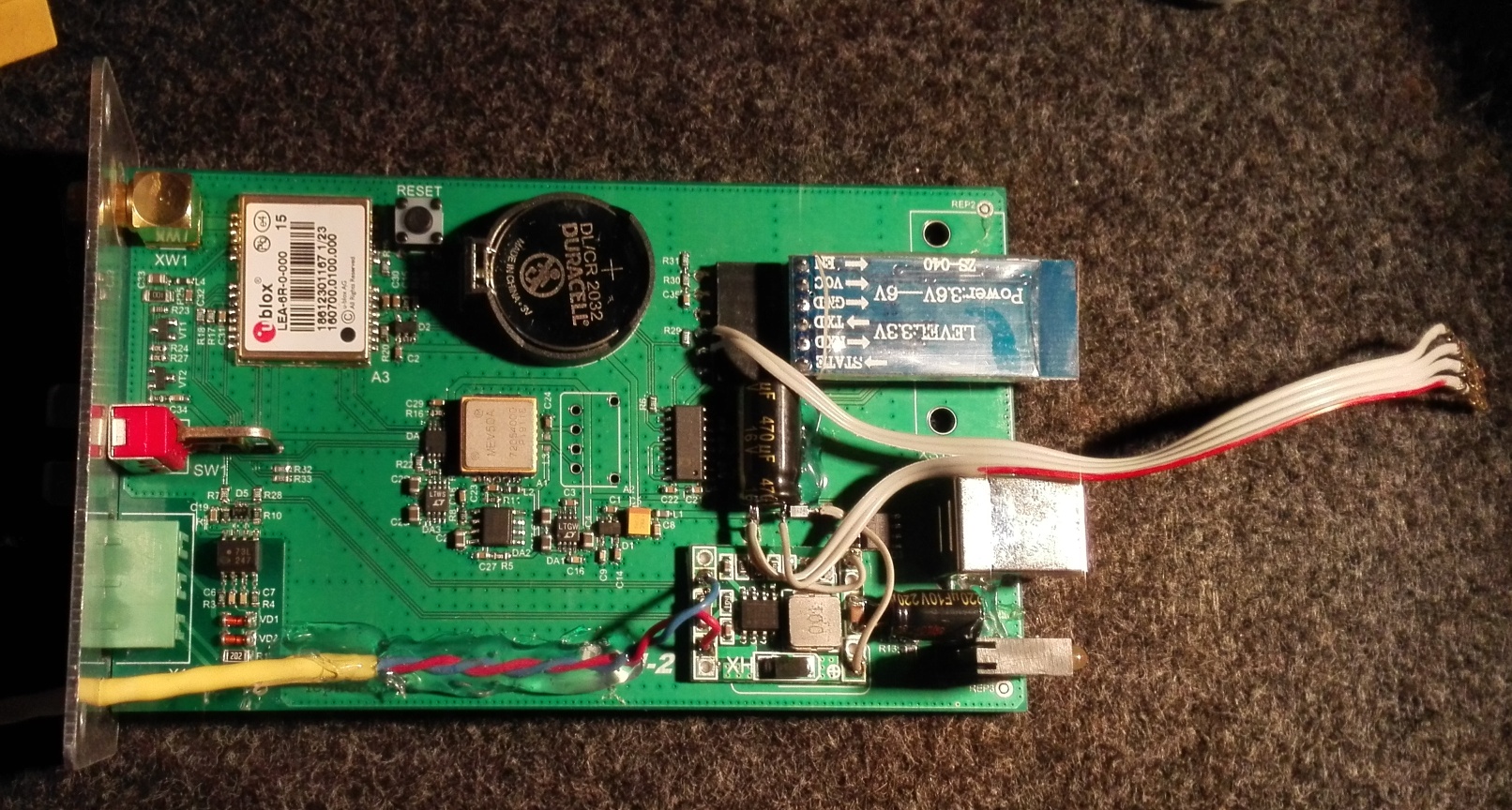
Очередной виток проекта близится к своему завершению: к НГ должно появиться еще немного коробочек с гироскопом и одометром. Косяки 8го чипа и неготовность 9го оставили работоспособной только коробочку на чипе LEA-6R. Вот ее то и удалось перевыпустить, ограниченным числом, для любителей математических изысков и картографирования мест, неподвластных спутниковым приборам, даже с RTK.
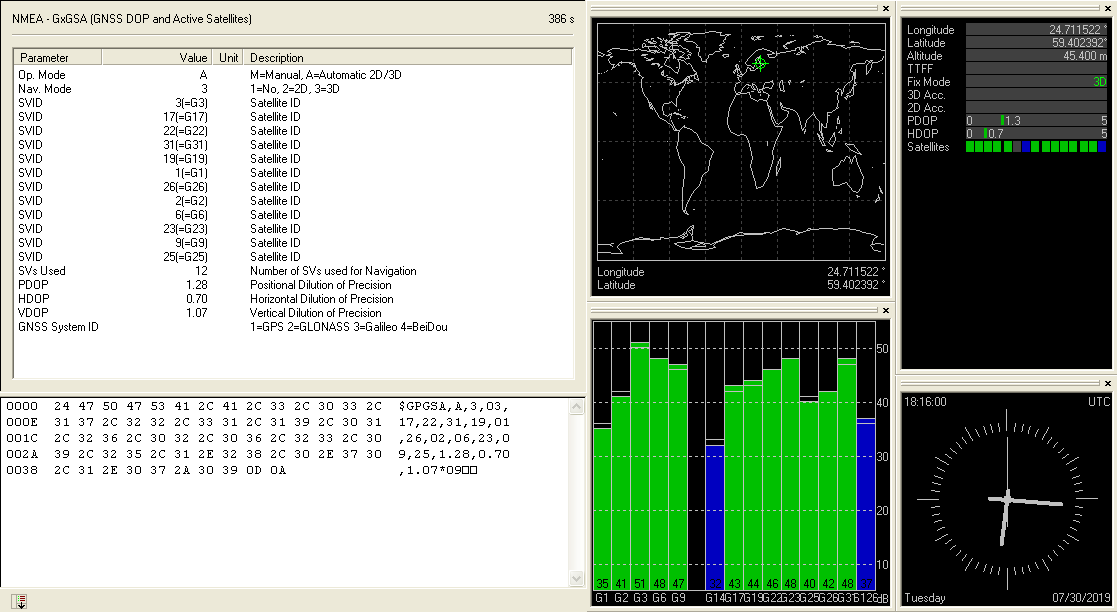
Краткое содержание предыдущих 15 страниц: коробочка предназначена для установки в четырехколесное транспортное средство, проходящее повороты с минимальным креном. Основной режим работы - GPS. Она принимает спутниковые сигналы на отличную внешнюю магнитную антеннку на крыше авто и передает координаты на Ваше навигаторное-картографирующее устройство - ноутбук-планшет-телефон и т.п. Понятное что делает он это намного серьезнее, чем встроенный навигационный чип (если он есть) хотябы за счет благоприятных условий приема GPS сигналов внешней антенной.
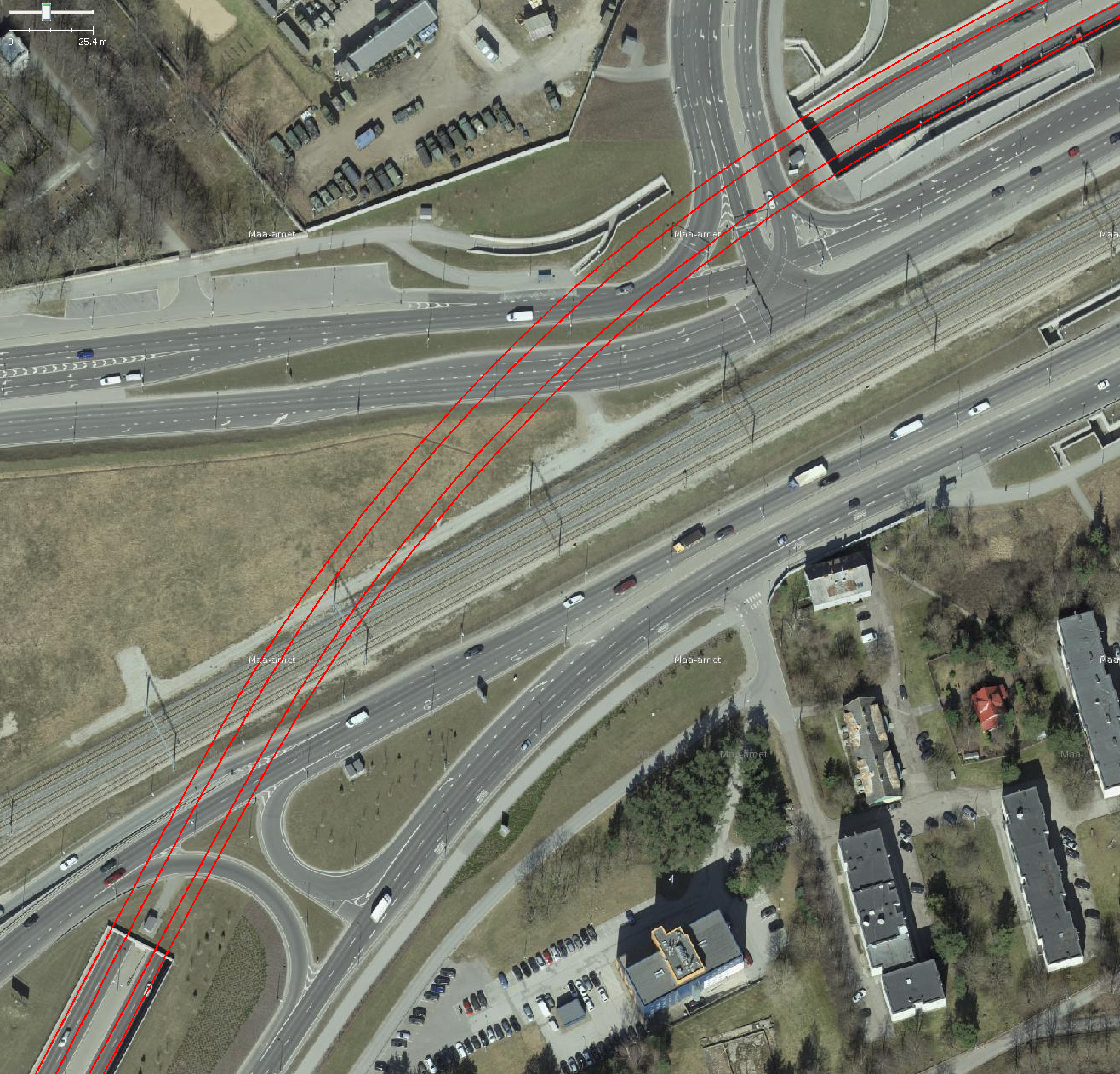
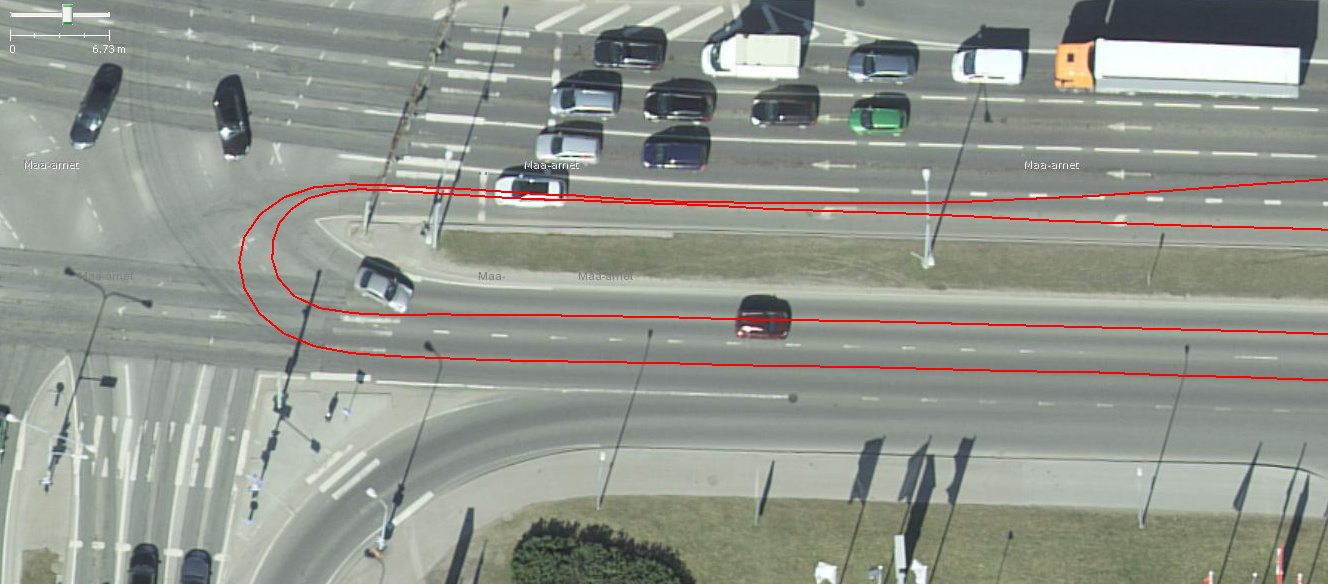
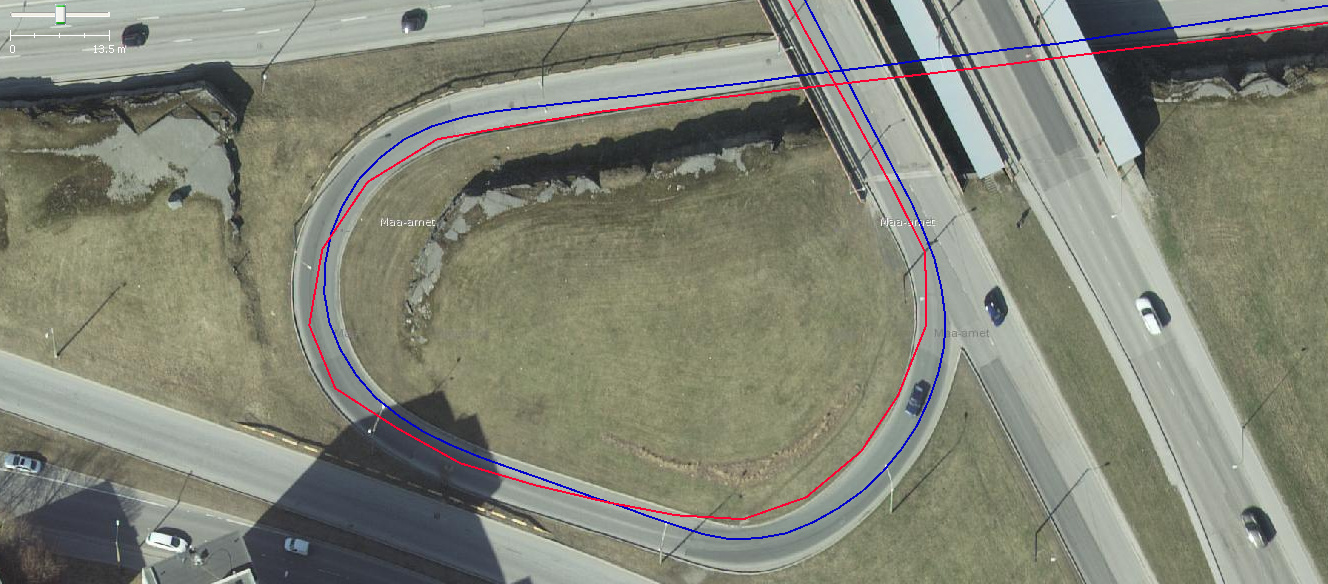
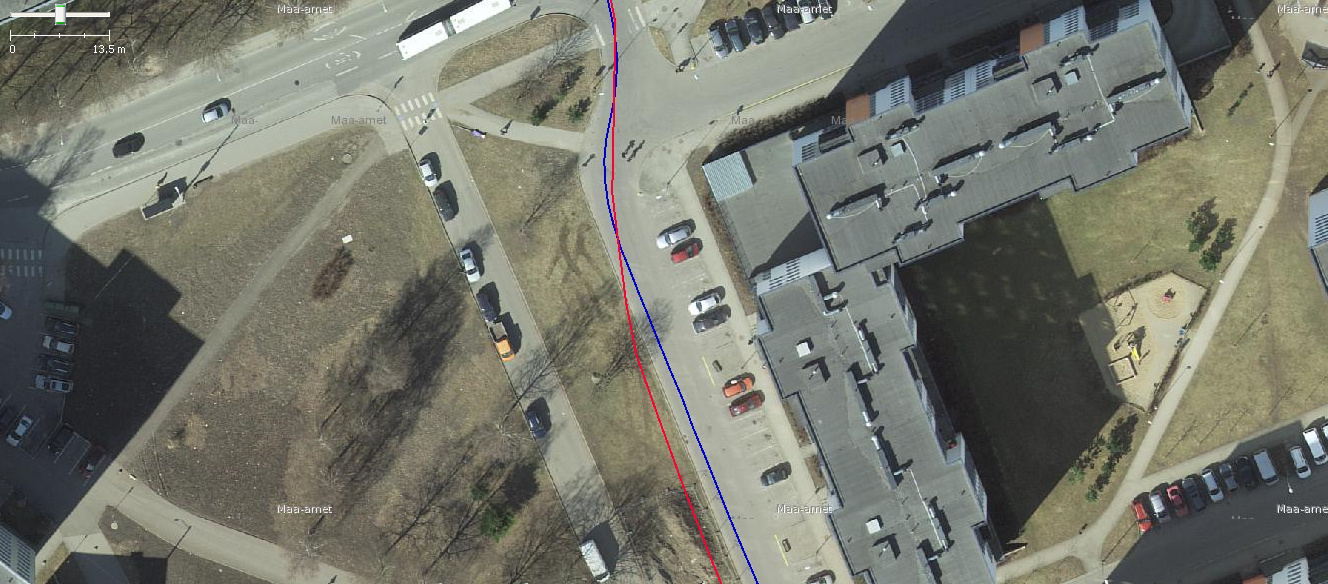
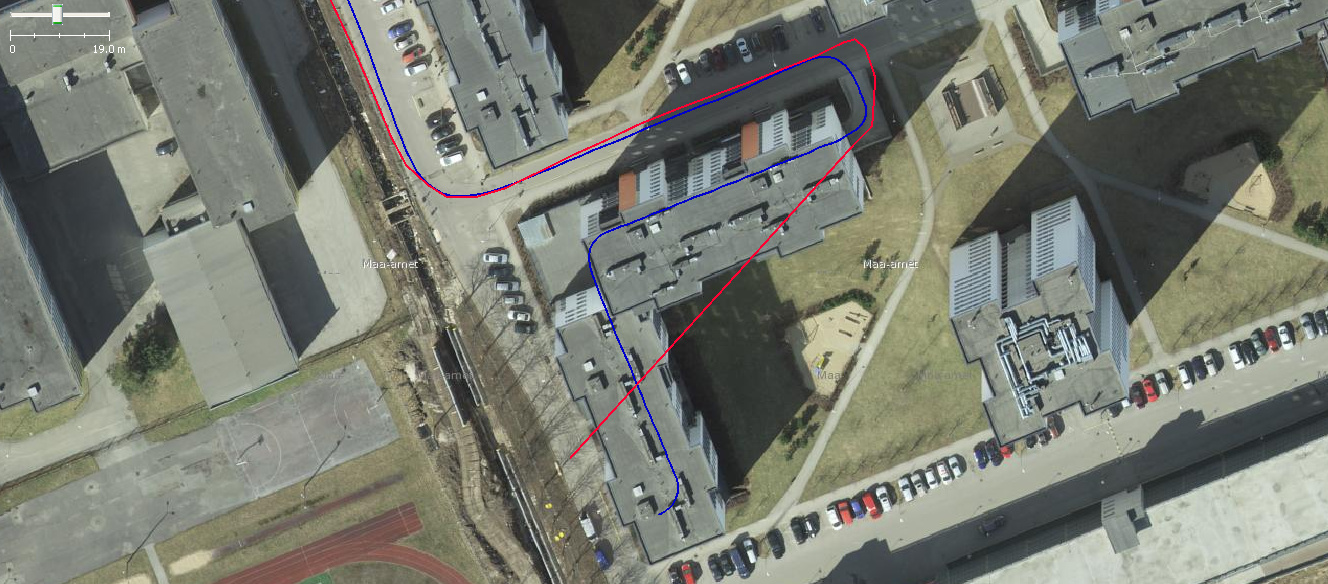
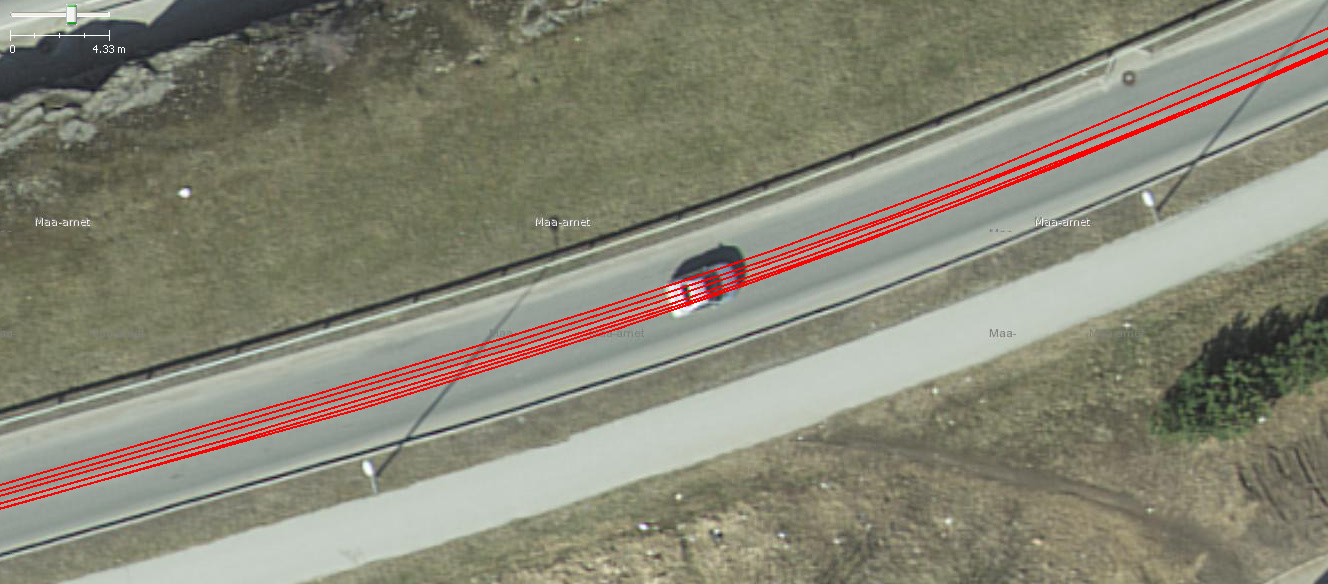
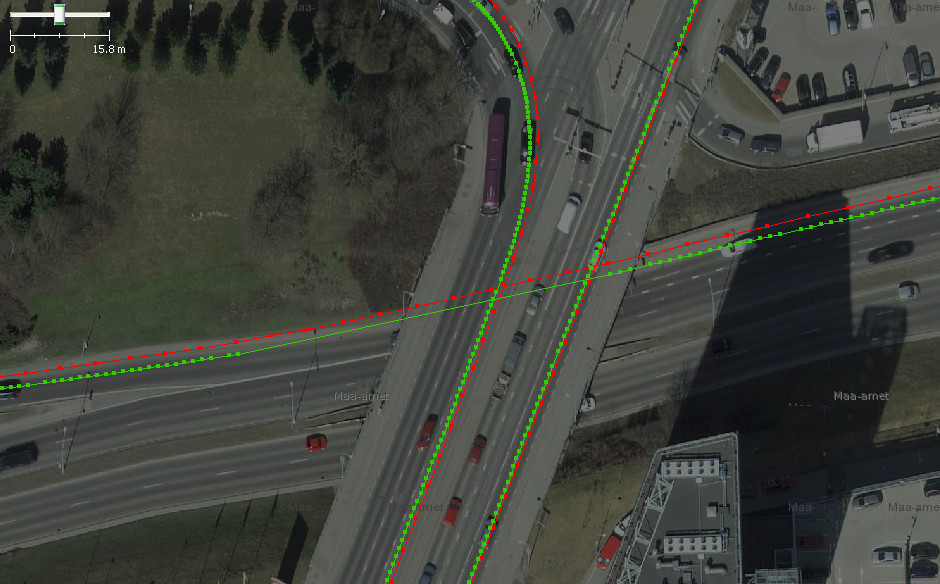
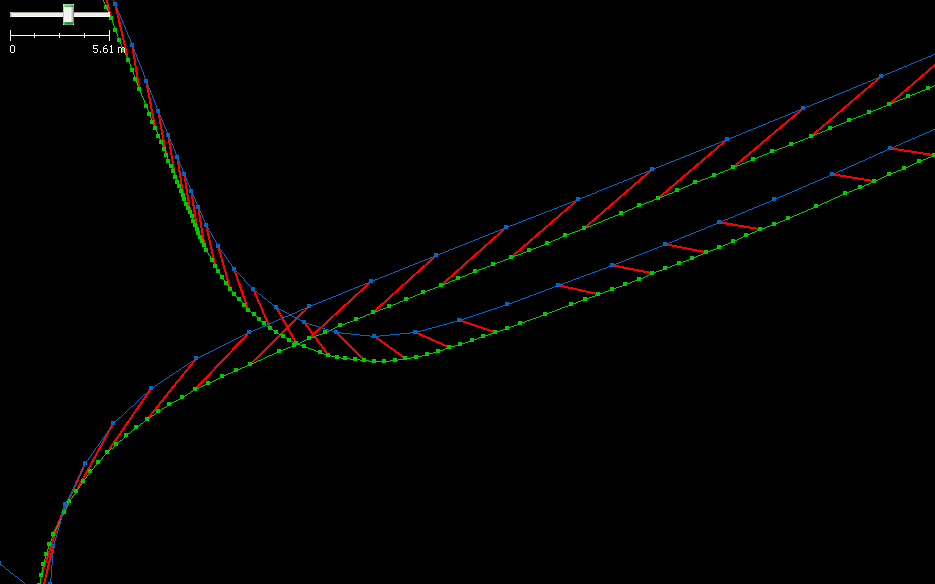
Но основное ее(коробочки) свойство - ИНС - способность выстраивать линии и траектории движения не как массив абстрактных точек от летящих в космосе спутников, а именно описывать маневры автомобиля: тут притормозил, тут вошел в поворот, тут перестроился. Графическая разница местами фантастическая. Картинки сравнения на этой странице выше. Спасибо уважемому SviMik!!! Даже если набегают погрешности это не бесформенные звезды дрейфа GPS, а все равно красивые линии градостроительных или ландшафтных структур, осей дорог или бордюрных камней, кто как ездит. Это главное.
Сведения о подключении к авто: на вкус и цвет у всех фломастеры разные. Самые качественные результаты у профессиональных установок типа магнитики на ободе колеса, геркон или proximity sensor на ступице считатет обороты колеса и полученные импульсы прямиком выдает в коробочку. Менее хлопотное хозяйство - найти в машине сигнал VSS, в приборке, за магнитолой и т.п., но такой вариант в CAN машинах встречается все реже и реже. Самый бизнес-лакшери вариант - подключение специального адаптера к CAN шине. Он берет все нужные данные из штатной проводки и генерит пульсы VSS для коробочки. Цифровые посредники передачи данных приводят к задержкам, поэтому для качественных результатов приходится немного корректировать манеру вождения. Достать CAN адаптеры на VW и Hyundai легко, на другие немецкие авто посложнее, на остальные авто еще сложнее (дороже). Так недавно поставили всю систему на SsangYong Kyron 2010. Дико сложный протокол обмена данными, но все подключили-поставили с первого раза, профессиональная установка - несколько небольших коробочек под правым сиденьем. Как нибудь выложу фотки.
Сведения о подключении к навигатору. Ноги у всей истории растут из CarPC и Windows 95-7-10, поэтому основной разъем - USB. Даже если у Вас нет компа в машине этот разъем понадобится чтобы подать питание на всю схему. Второй по популярности способ подключения - bluetooth. Вообще все коробочки-провода спрятаны внутри, ничего не торчит. Android, MOSK-служба, пара программ и все работает. Не бог весть какие сложности. Таксовать с таим не дадут потому что таксистам запрещены фейковые GPS, остальные все приложения работают. Айфоны не поддерживаются (я не знаю как подключить). Может можно както. Зато для hardawre специалистов множество возможностей подключения - RS-232, TTL-UART, NMEA-0183 и бинарные протоколы по высокоскоростным шинам.
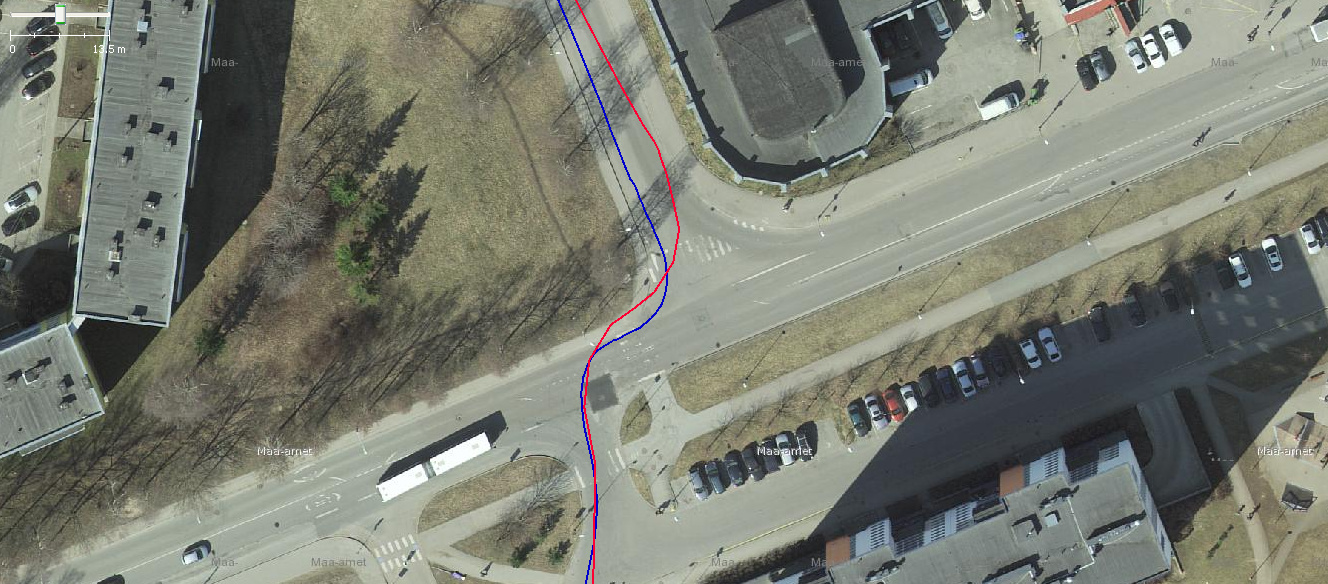
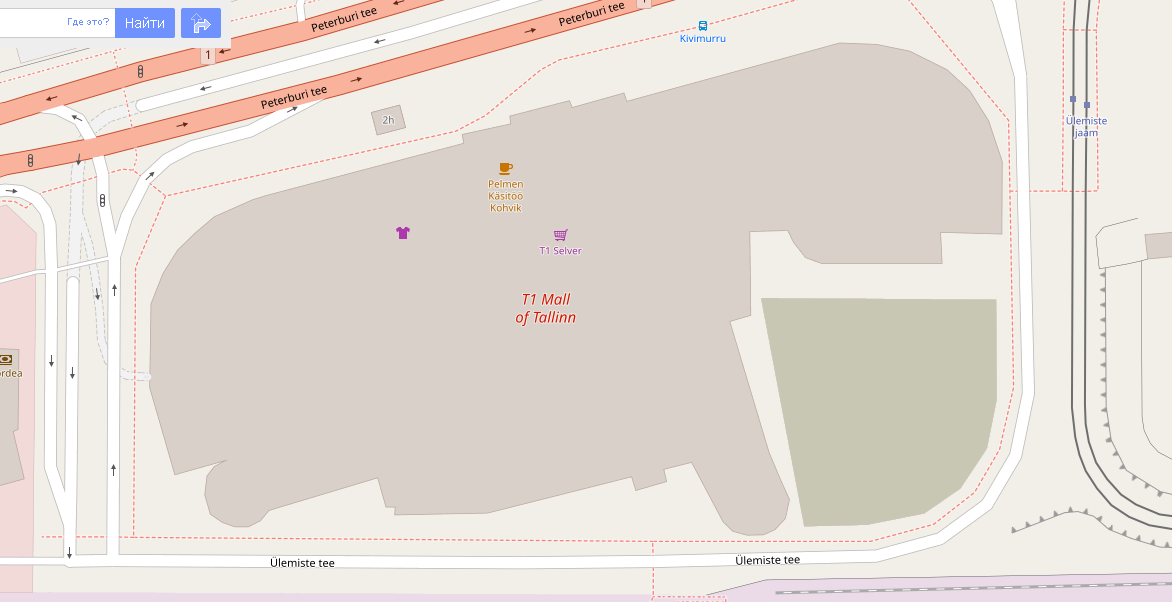
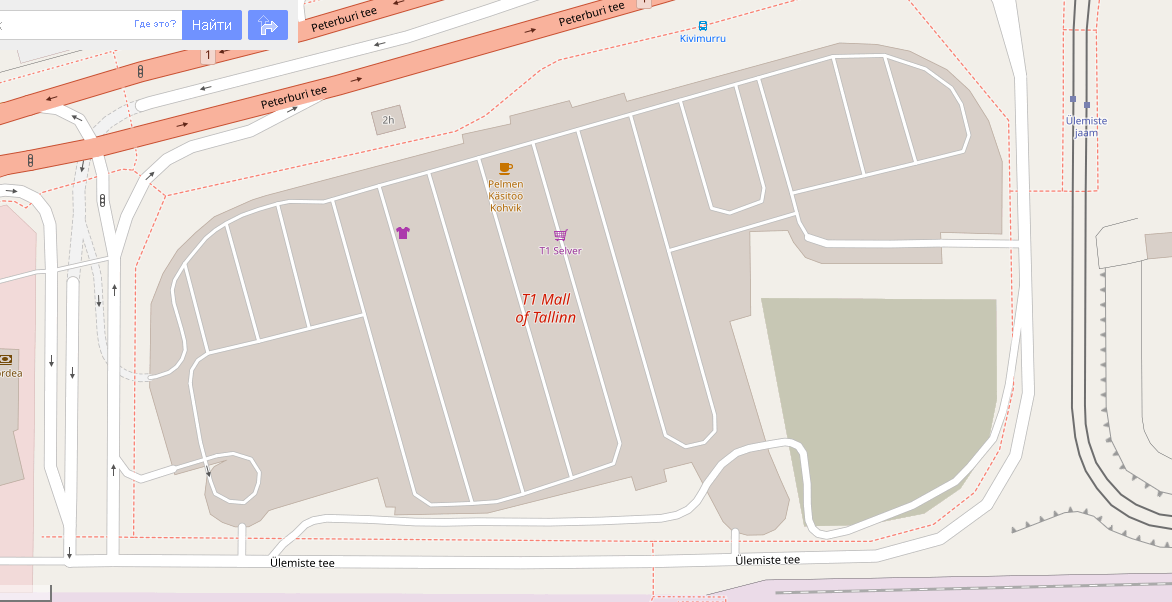
Есть во всей этой истории и практическо-навигационный выхлоп: ваши шансы выехать в нужную сторону с подземной парковки или из многоэтажного гаража с работающей навигацией многократно возрастают. Ну и элемент эксклюзива - такого ни у кого нет. Кайфы.

На рисунке субботний заезд под ТРЦ в дикой пробке. И выезд!!
Хотелось бы понять насколько это может быть интересно сейчас. По идее самое время, премия на НГ и пару расслабленных недель чтобы все установить-собрать если своими силами. По себестоимости производства опять удалось уложиться в четырехзначный ценник, хоть и не так свободно как раньше. CAN адаптеры стоят 5-7-15 тыр. теоретически, но торговать ими не планировалось. Если много желающих наберется можно будет подумать о некоей централизованной поставке. Пока каждый себе сам доставал.
Более предметное общение в личке тут и там ↓↓↓






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}