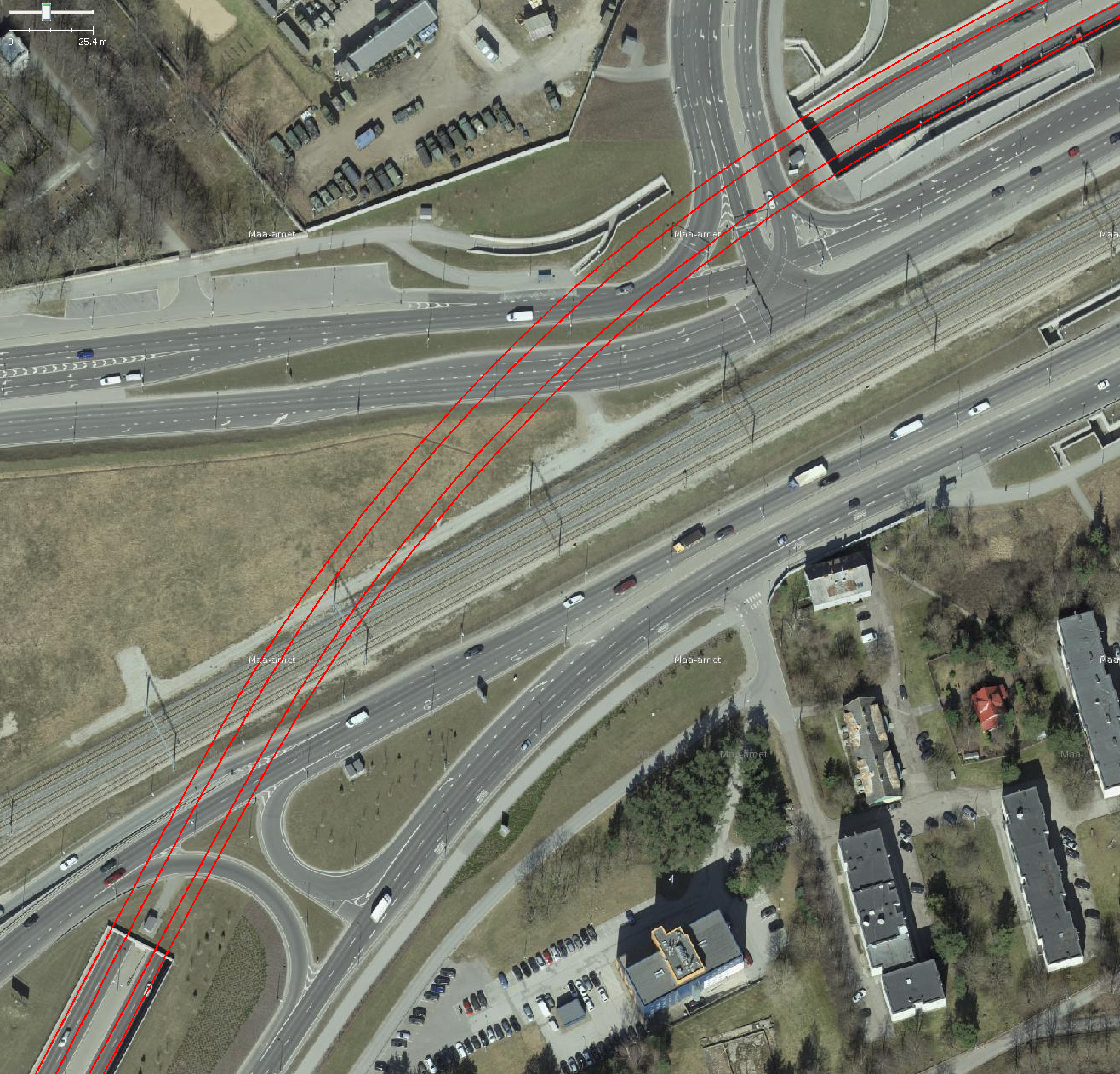
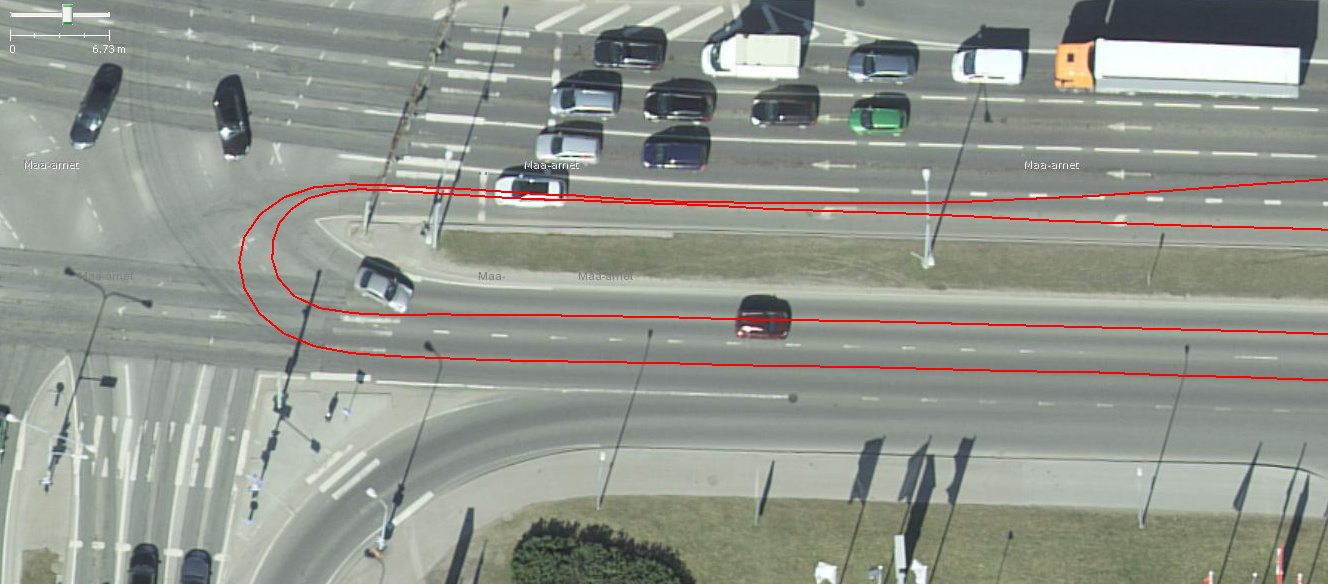
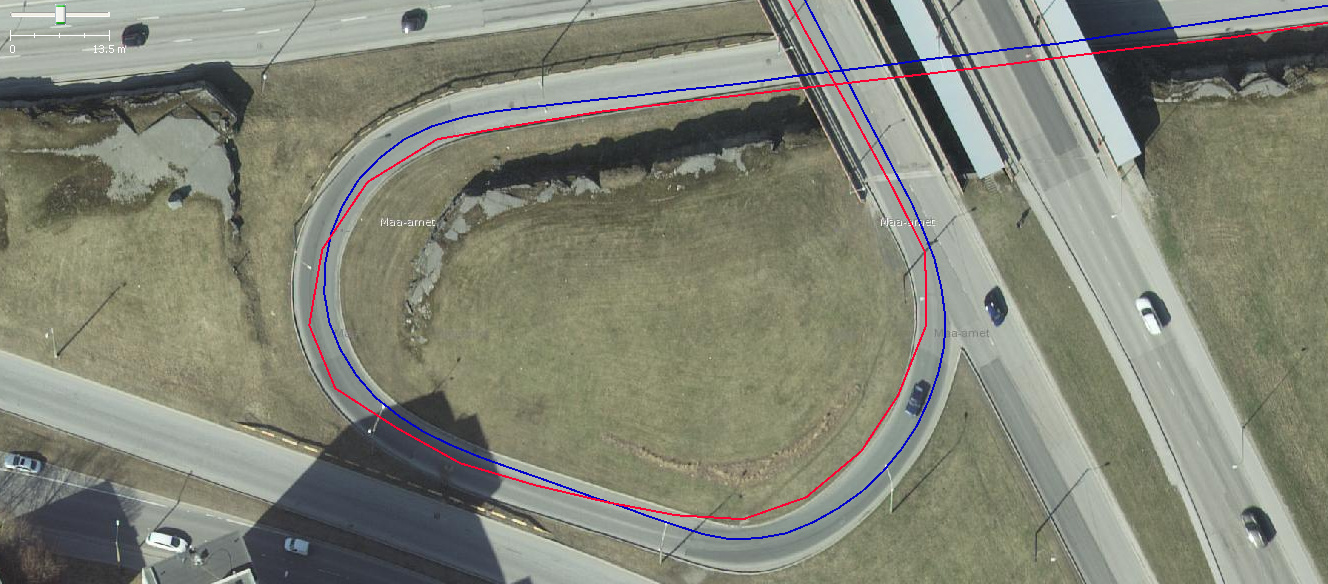
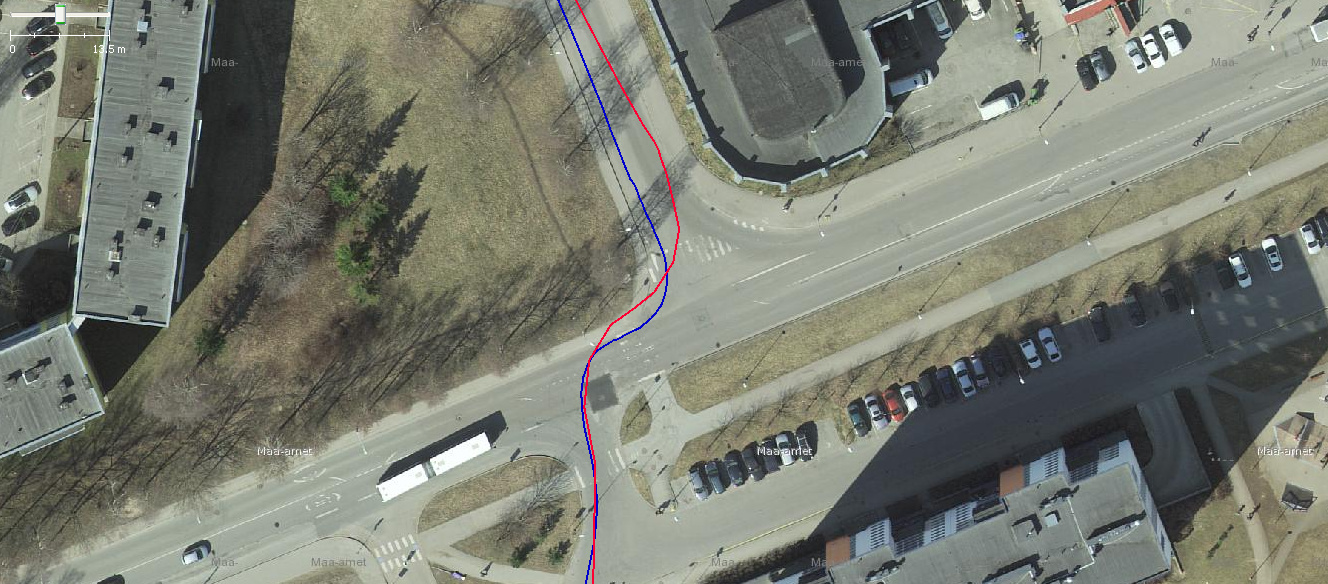
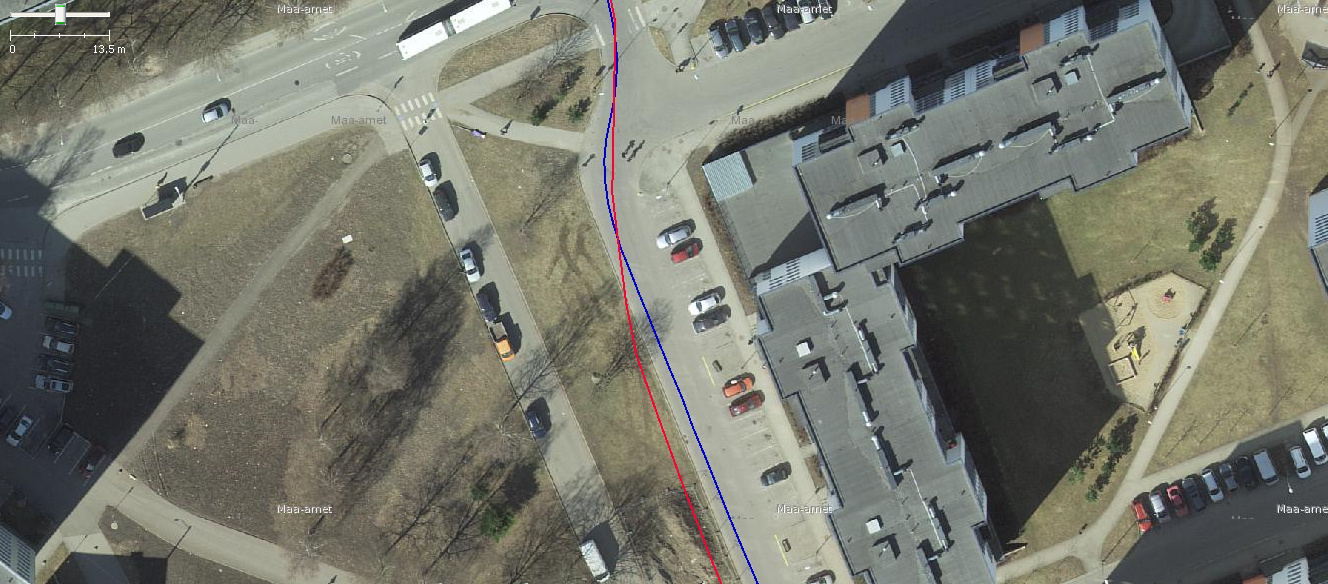
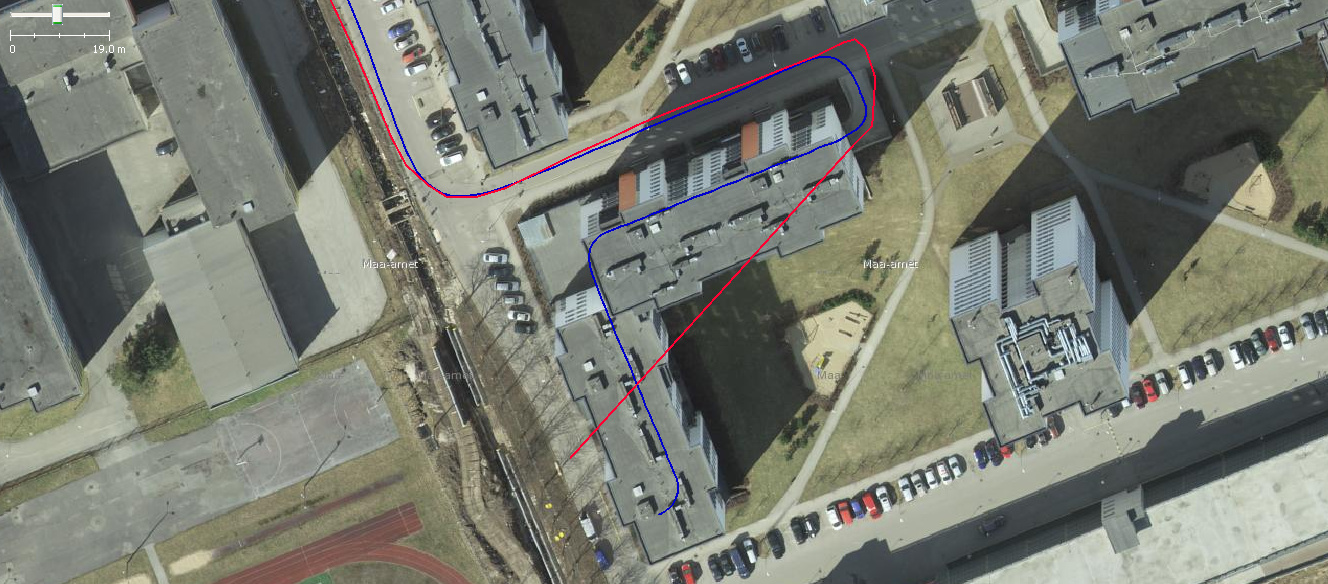
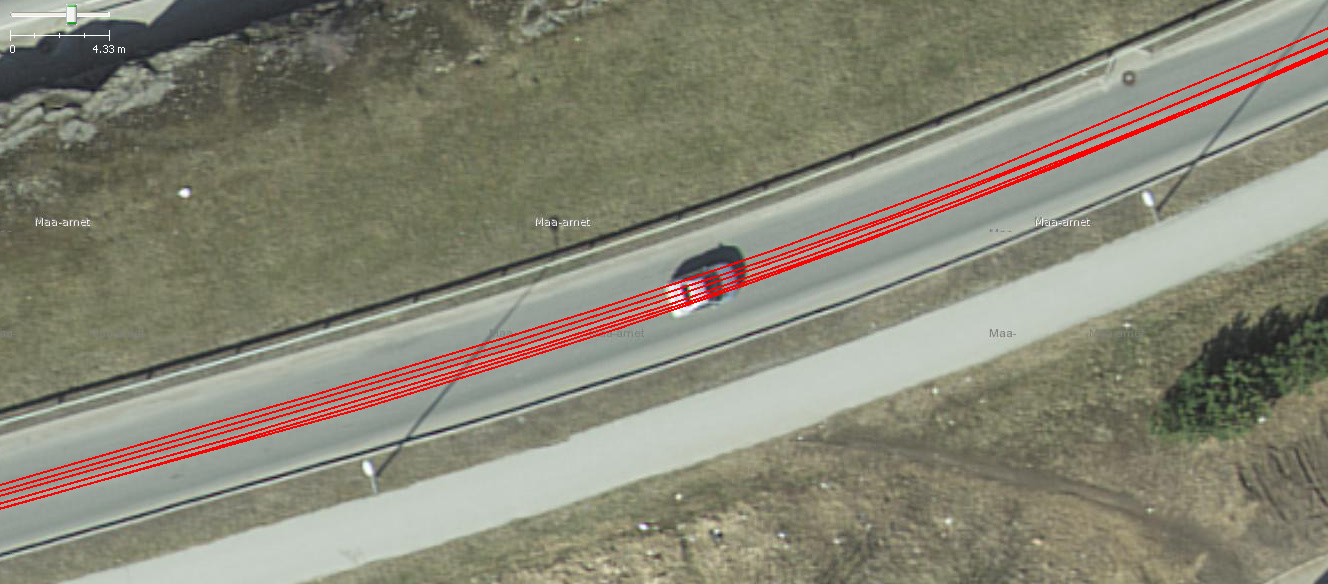
Спасибо за такой позитивный отзыв. Давно не было так радостно от чьих-то побед. Пример трека тоже очень позитивный, в городе чисто-спутниковая навигация такого никогда не даст, прямо с радиусами. На меньших радиусах разница ИНС еще больше заметна, но для этого надо импульсы брать с заднего правого колеса, если осевые линии дорог уже есть и нужны газончики и бордюрные камни. Ехать нужно тоже соответствующе - правее ![]()
Про пожелания:
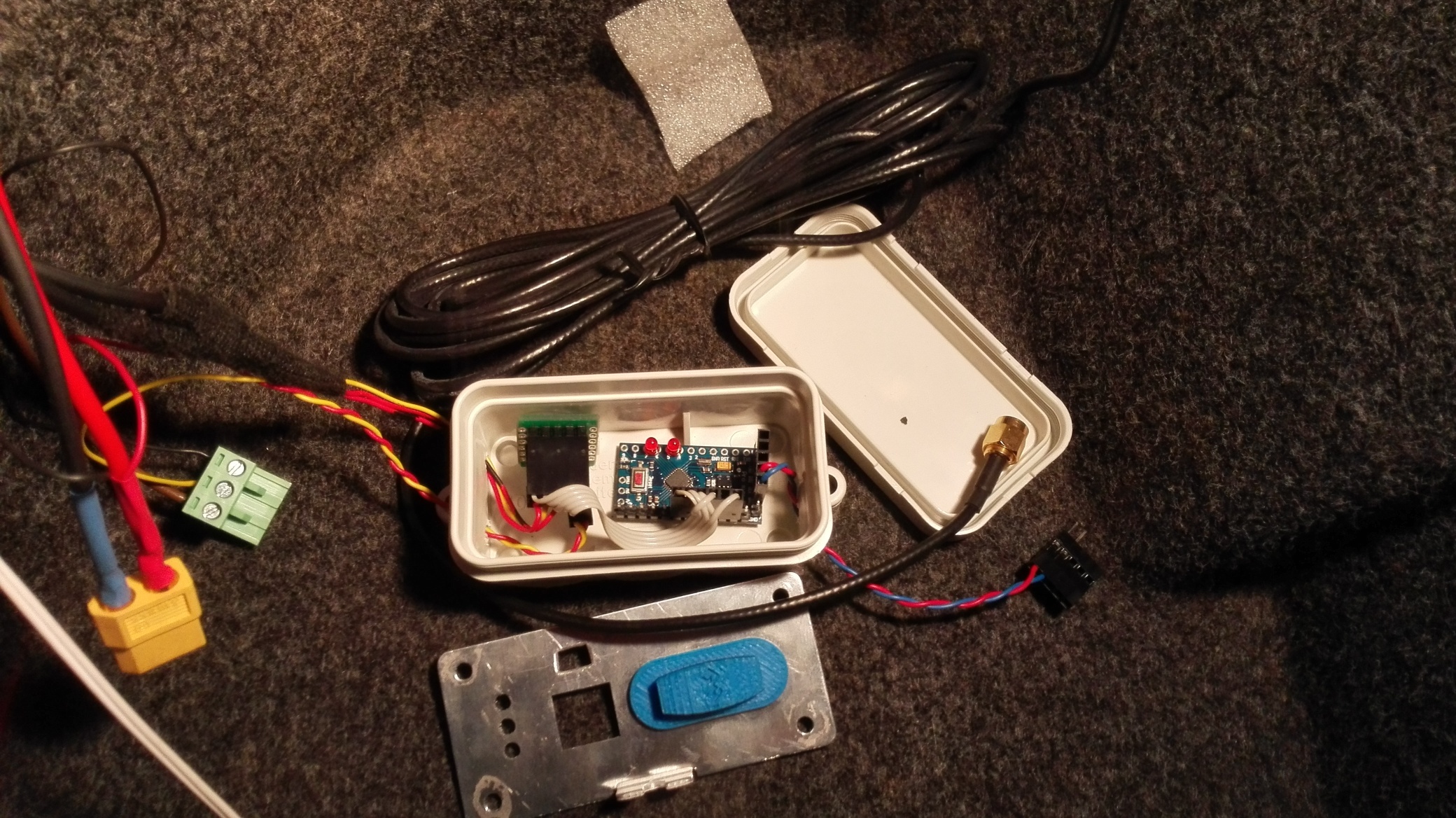
- Я сам удивился насколько меньше проблем в жизни становится если в автомобильном девайсе не делать питание от 12В.
 Надо пересмотреть эту позицию с учетом современного китаепрома. Уже несколько установок было через 5в преобразователь.
Надо пересмотреть эту позицию с учетом современного китаепрома. Уже несколько установок было через 5в преобразователь. - Можно сделать BT и RS232 одновременно. Мешает то что прямо на самом чипе второй выход физически USB, с работой с фирменными драйверами, виртуальным портом в компе итп. Его переделать назад в rs-232 - это целая история с риском получить кирпич. Bluetooth возможно проще.
- UART в TTL тоже несложно вывести, но места не так много, кроме того есть компоновочные проблемы: каждый лишний порт шумит, а RF-часть, а особенно цепи гироскопа очень боятся таких шумов. Получается что страдают люди, которым не нужен UART. Есть идейка как этого всего избежать - сделать байпасс на max 12в, чтобы без него выводить ttl напрямую на разьем db-9. А BT при этом повесить на USB. Так может быть шанс сохранить уникальные характеристики всей коробочки по основному показателю - чувствительности приема GPS.
- Тоже было в планах поковыряться в HC-05, в некоторых версиях HC-06. Пока они находятся в режиме “темный лес” - либо работают, либо не работают. Как нерабочий перепрошить и настроить пока не приходилось разбираться.
Вобщем посмотрим что радиоэлектронный рынок предложит “10 лет спустя”. Если получится собрать комплектуху, то к НГ можно будет что-нибудь замутить ![]()



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}