Человек делал это на голом энтузиазме по себестоимости. Интереса у публики это не вызвало, грех теперь жаловаться “дохлый - не дохлый”.
Хобби обычно такое дело - добился успеха и пошёл дальше.
- Чистейшая правда, 12 лет назад именно так все и было, потому собственно и появился проект. Не для продажи, а для себя лично. Ну и если кто поучаствовать хочет - велком.
- Есть восьмой чип, в evaluation kit, очень дорого, там какой-то косяк с памятью, не запоминает настройки а без них фактически валяется на полке без дела. Техподдержка не стала утреждать себя ответами.
- Ну у меня есть и что толку с того? Нерабочая вещь впринципе.
- ИМХО это как с багажом в шереметьево. В дело вмешались “эффективные” менеджеры. Маркетолухи сказали что продажи сдерживает гиморойность подключения ко всем этим каншинам в машинах, сделайте автономку. Ну сделали. Но показывает она КМК хрень потому что она даже нулевую скорость не может определить изза дрейфа, т.е. разница с неИНС GPS исчезающая. Смысла GPS с гироскопом и одометром потерян совсем со всеми вытекающими. Из связки гироскоп-одометр именно последний суперточный прибор. Эти все mems гироскопы - оборудование бытового класса и без серьезной поддержки, в “автономке” ничего толком сказать не могут.
- Для меня лично остается загадкой как люди отличают “дохлый сайт” от “недохлого”. Интерес действительно минимальный, сидеть там смысла нет, но в личке неотвеченных сообзений никогда не было. Отсюда с осм вообще уведомления приходят. Спрашивайте, отвечаем. Пару приборов может и осталось, именно в таком виде “подключить и поехать”. Собственно из-за этого и был весь сыр-бор.
Из новостей чисто реакция на автопром. Машин без CAN-шины уже практически нет, т.е. это фактически последний канал связи с машиной. Поэтому просто нужен переходник со штатными разъемами авто. На выходе нужены speedpulse и задний ход. Хотите свой доставайте, хотите я закажу за границей. Это долго и дорого. Готовые решения плюс-минус в наличии есть на WV и Hyundai, подешевле и побыстрее. Сложнее всего с машинами типа старого Кайроном. Месяца два шел переходник этой зимой, но все заработало с первого раза. Установочная студия классно все установила.


Не то чтобы не вызвало, но все кому надо было - получили. Последние годы - да, единичные фанаты появляются, но это просто время такое - “разбираться в деталях - не главный конек современного бизнеса” :D:D:D
Понятно. Значит, произошло недопонимание. Я-то за проектом посматривал, но помню, он был в статусе разработки и прототипирования. Думал - подожду, когда оно будет в статусе “запущено серийное производство, можно заказать на сайте”. Не знал, что этого и не планировалось.
- Перехожу по ссылке в вашей подписи
- Нажимаю на ссылку “Сайт” в шапке форума
- Firefox can’t find the server at dr.unoforum.ru.
- ???
- Сайт дохлый.
У меня в Шкоде speedpulse доступен прямо с датчиков ABS (уже игрался с ним, подключая к ардуине). Задний ход могу взять с фары заднего хода. Выходит, не нужен мне ни CAN, ни переходник.
А можно мне тоже? ![]() Просто, тут такое дело… сами видите, в какой стране я живу
Просто, тут такое дело… сами видите, в какой стране я живу ![]()
У ublox появилась весьма интересный чип ZED-F9K
Обещают GPS, GLONASS, Galileo и BeiDou, причём все четыре могут работать одновременно. И, вроде как, он двухдиапазонный? Вижу там L2 в списке диапазонов. Ну и dead reckoning, само собой, имеется.
По описанию - убойная штука. Жаль, с суффиксом K в продаже не вижу. На ебее есть ZED-F9P за $244, но он без DR. Но даже он обещает “centimeter level accuracy in seconds”.
Кто-нибудь тестировал?
1.Странно, проверил все работает. Может сайт заблокирован там? Можно еще на этом форуме под аватаркой нажать кнопочку “Email”
-
с ABS заднего колеса сигналы - это прекрасно. Главное чтобы после подключения сам ABS не выключился. Там маловат уровень сигнала, можно поднять транзисторным ключиком или еще чем, не знаю как но одобряю - если брать прямые данные о положении колеса, да еще и вовремя, без CAN-задержек - получается самая точная информация, лучше всего все ИНСы работают, мои и не мои.
-
Очень уважаю в какой стране, правда последний раз был лет 40 назад
 , кстати есть оказия на днях до кик-ин-де-кёк. Если устроит и успею собрать и проверить. Всеже лучше через личку на том сайте про детали.
, кстати есть оказия на днях до кик-ин-де-кёк. Если устроит и успею собрать и проверить. Всеже лучше через личку на том сайте про детали.
Ардуину уже подключал, ABS продолжает функционировать. В Шкоде там запас по уровню сигнала приличный.
Написал в личку модератору.
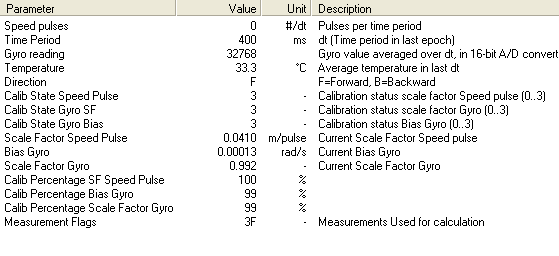
Девайс получил, всё супер!
Калибровка 100%, 99%, 99%, на калибровку хватило 30 мин (проехал 25км).
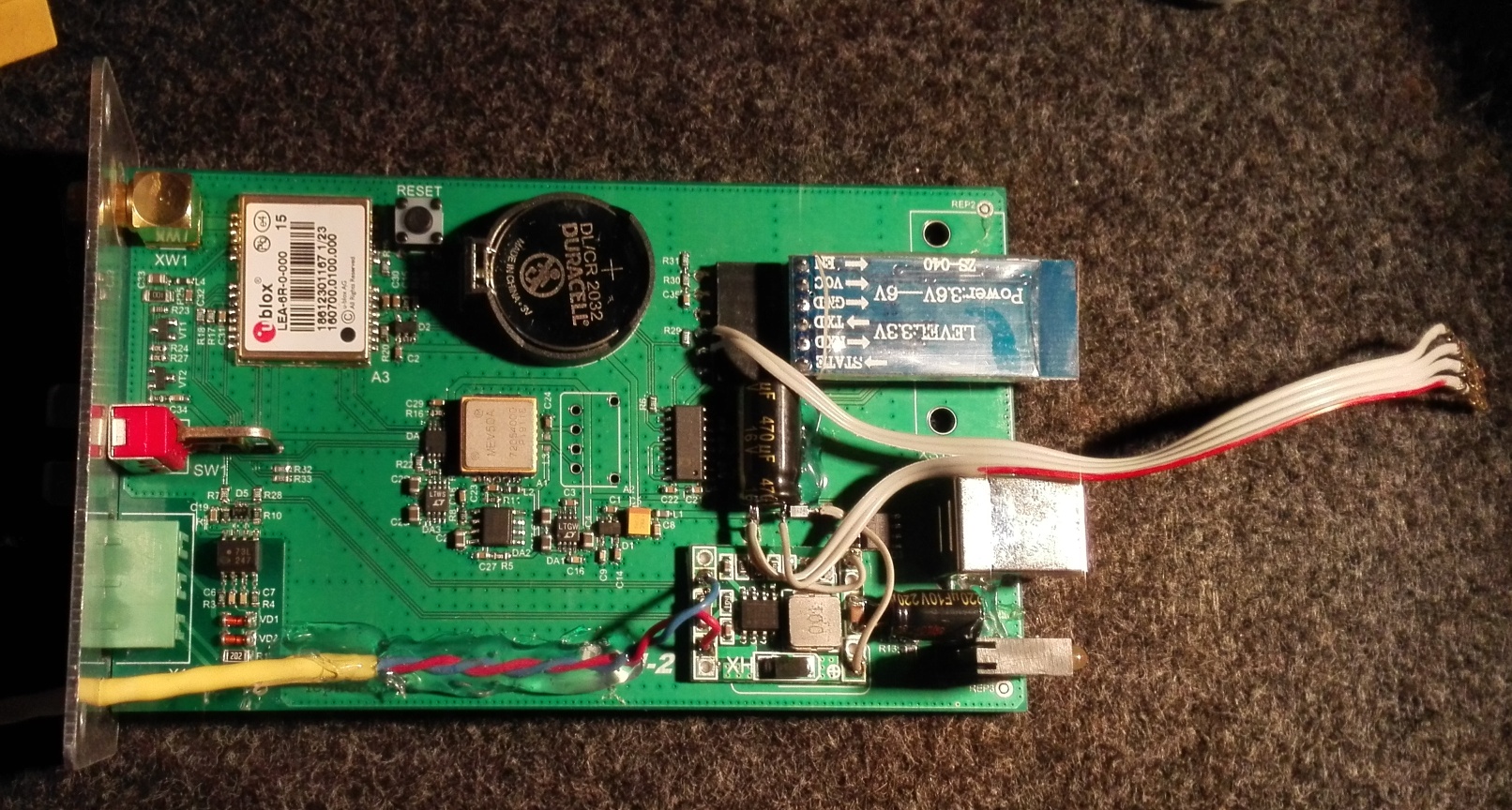
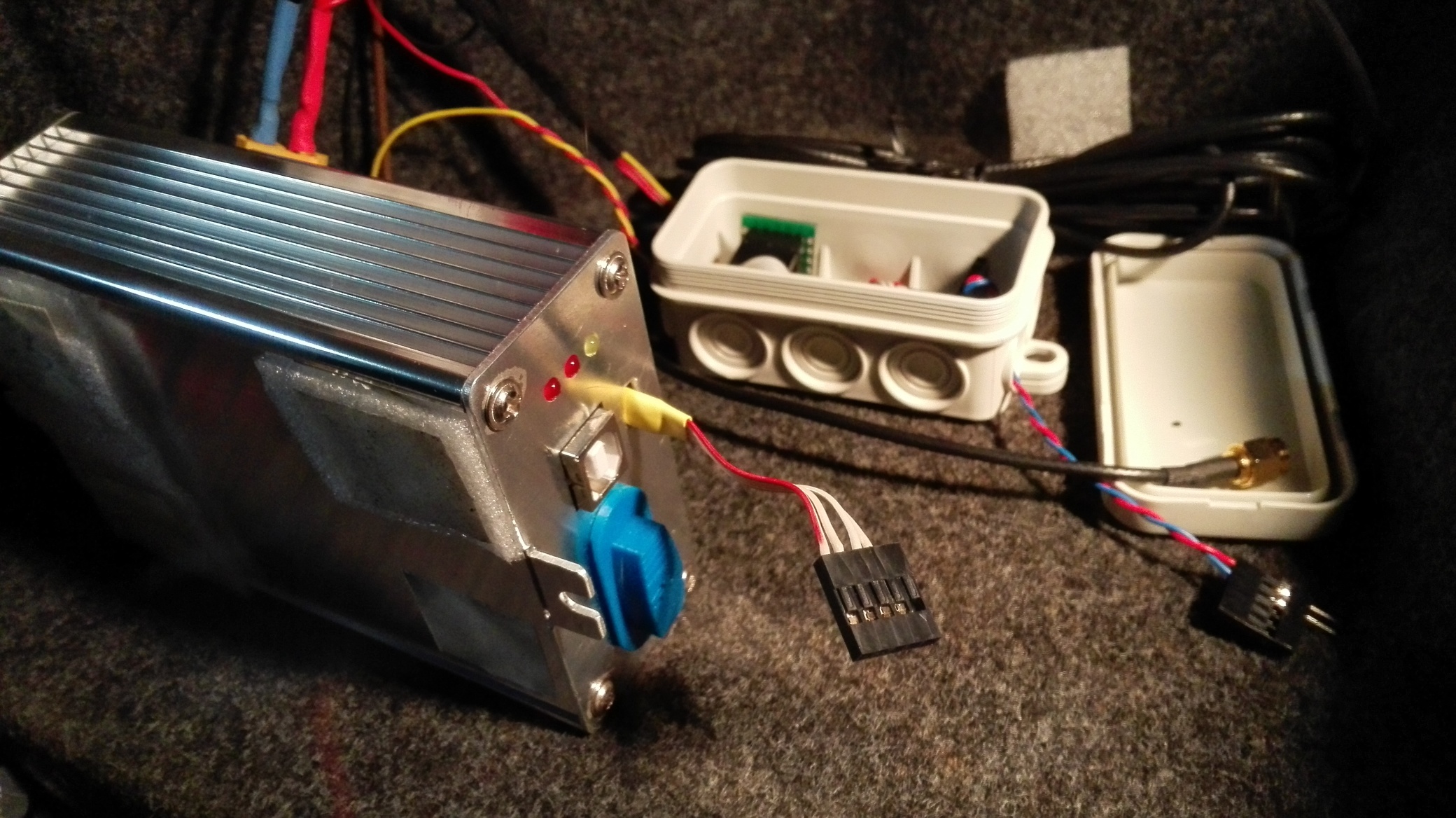
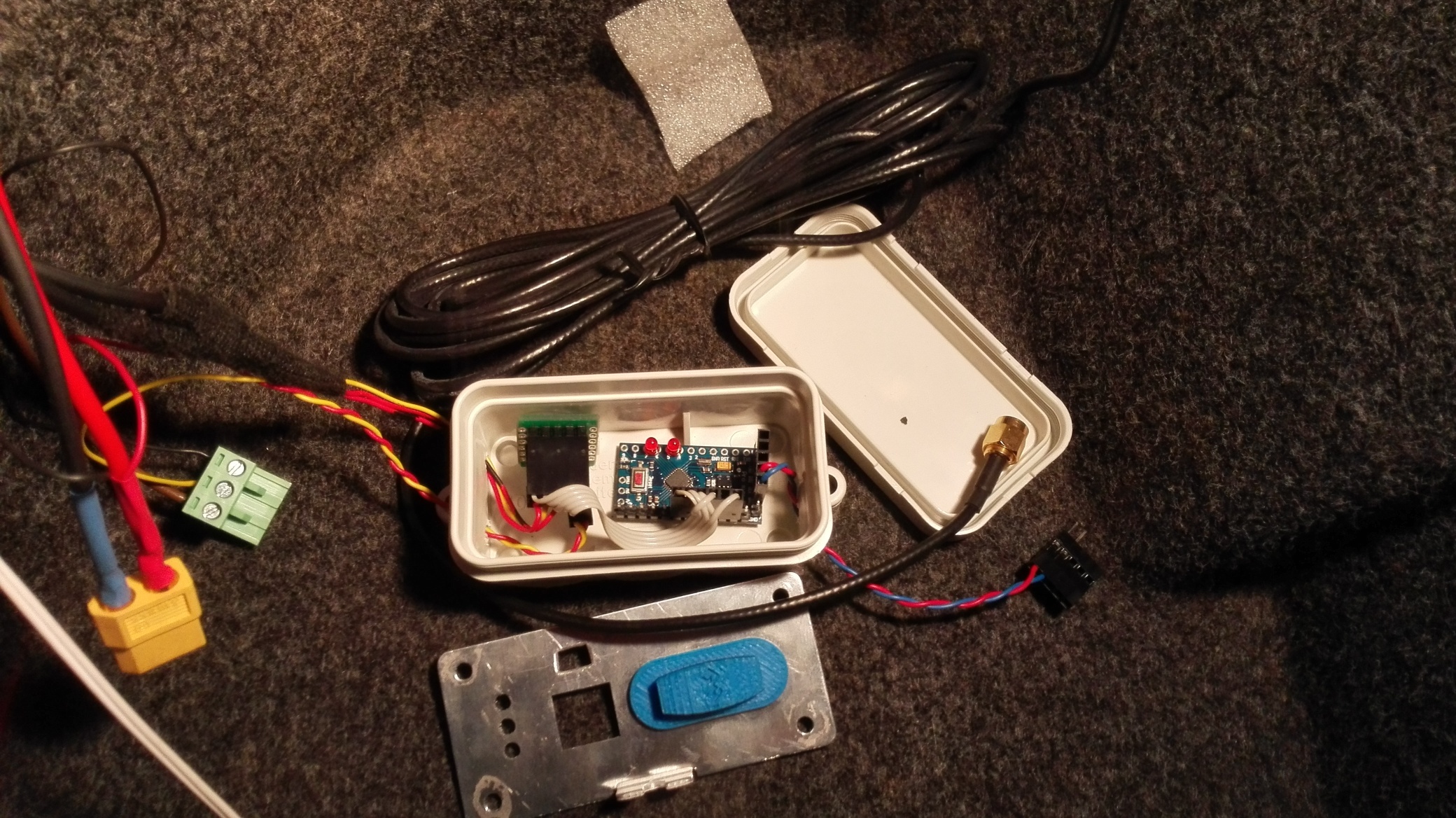
Из модификаций: сразу встроил преобразователь, чтобы питать от 12V:
http://svimik.com/IMG_20190727_095644.jpg
http://svimik.com/IMG_20190727_202135.jpg
Питание через USB меня не устроило, потому что я хочу туда подключать ноут, но при этом я не хочу, чтобы Bluetooth соединение переставало работать, когда ноут я отключаю.
{kind=link}
{kind=link}
Внимание: Устройство может уходить в спячку в момент отключения USB даже при автономном питании. Долго думал, от чего такое поведение: воткнул USB, вынул USB, и по Bluetooth данные перестают отправляться. Чтобы этого не происходило, надо в настройках в разделе USB выбрать вариант Self Powered. Не забудьте сохранить конфигурацию.
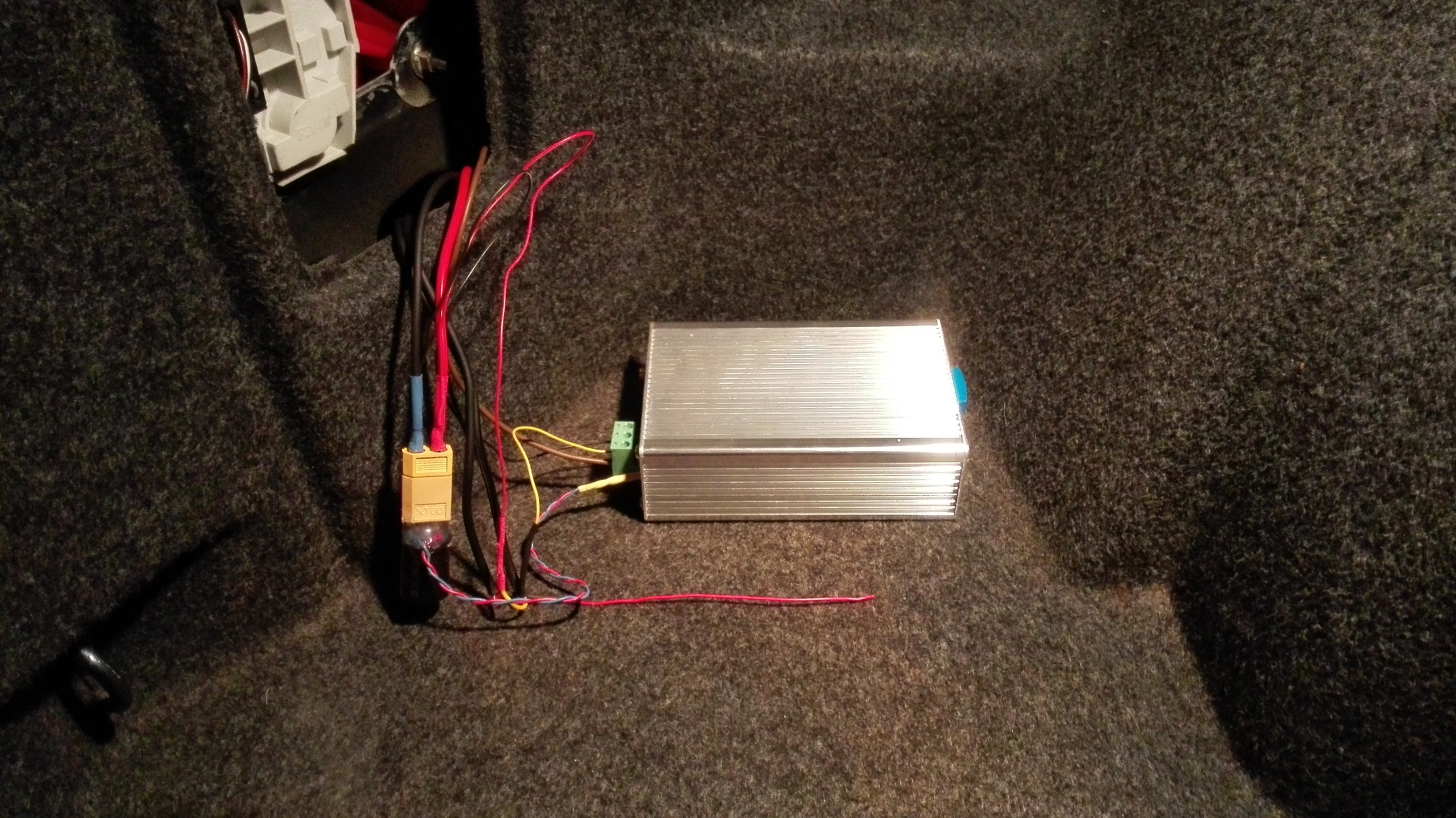
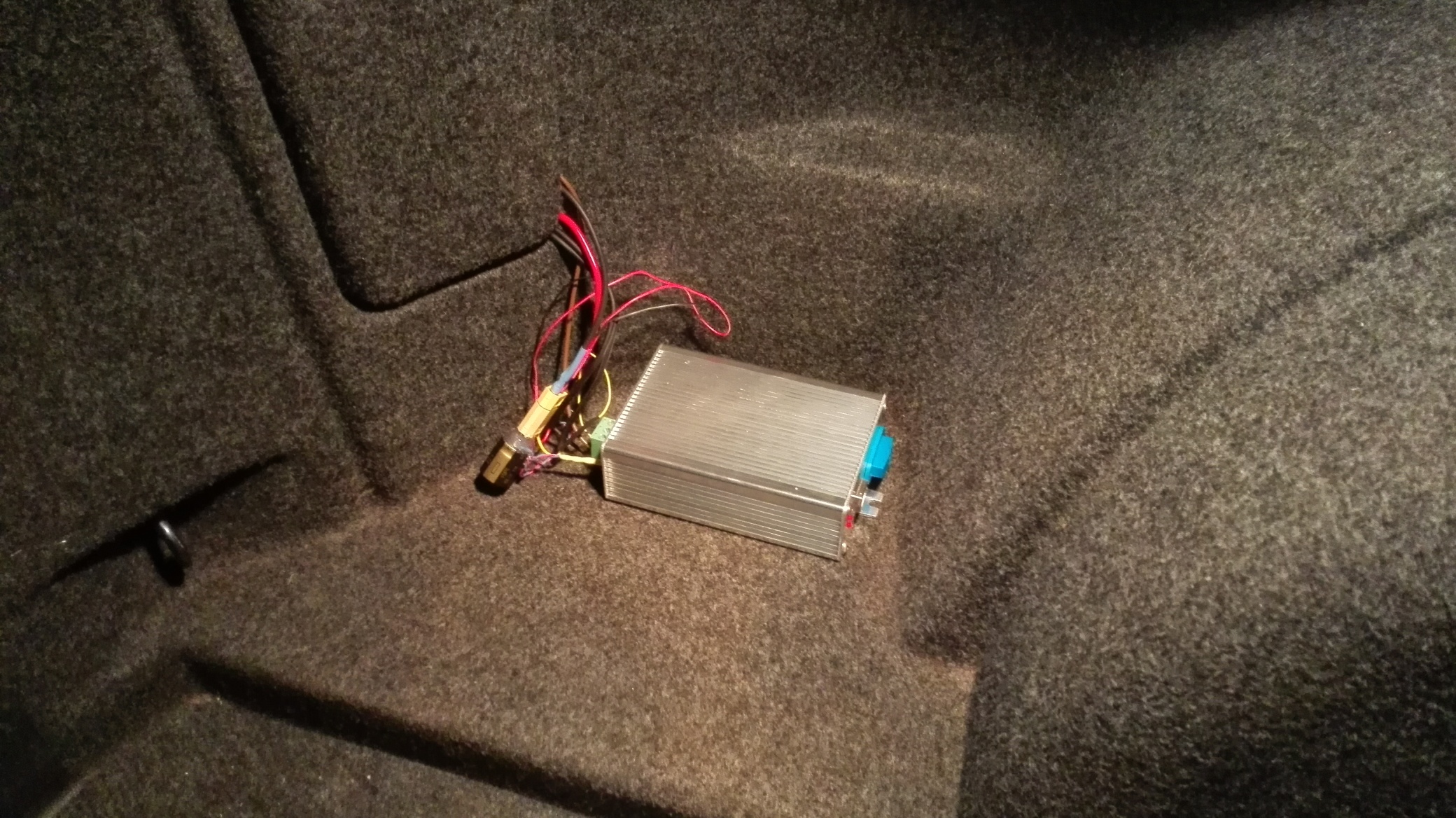
Установка: в багажнике слева:
http://svimik.com/IMG_20190727_232050.jpg
http://svimik.com/IMG_20190727_232426.jpg
{kind=link}
{kind=link}
Подключение: реверс - к фаре заднего хода, импульсы - к датчику ABS заднего колеса, используя дополнительную схему для согласования:
http://svimik.com/IMG_20190727_231032.jpg
Для Skoda Fabia схема будет состоять из оптопары и резистора 100ом паралельно ей. Схема подключается в разрыв датчика.
Имейте в виду, что у других автомобилей датчики ABS не такие, и схема там будет посложнее.
{kind=link}
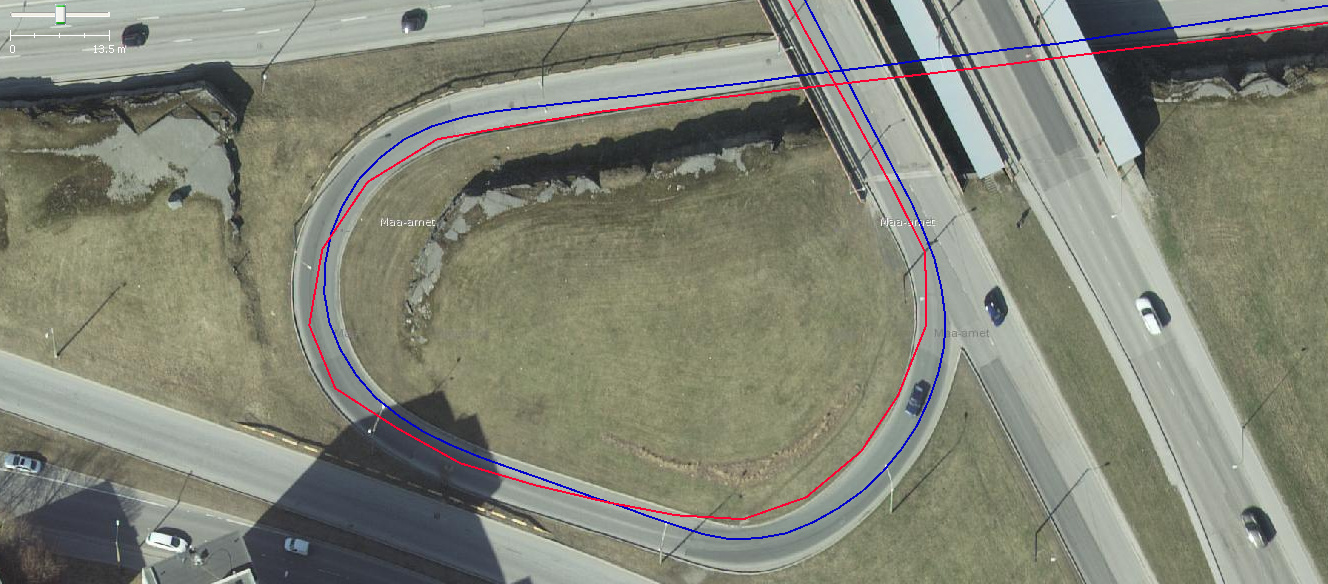
Пример трека:

Пожелания автору схемы:
- Добавить разъём для питания от 12V. Иронично, что в автомобильном устройстве нет входа для питания от автомобильной бортовой сети.
- Приделать BT и RS232 разъём одновременно. Не знаю, что мешает так сделать.
- Вывести UART разъём для подключения ардуины или другого МК (+5V, GND, TX, RX).
- Сразу настроить HC-05 на нормальное название (например, GPS) и нормальную скорость (например, 115200), иначе даже 4Гц туда не пролазит. Так мало того, что не пролазит туда, так ublox начинает и на USB пакеты терять из-за этого. Вся настройка занимает 5 минут, но требует переходника UART-USB, которого у кого-то может и не быть.
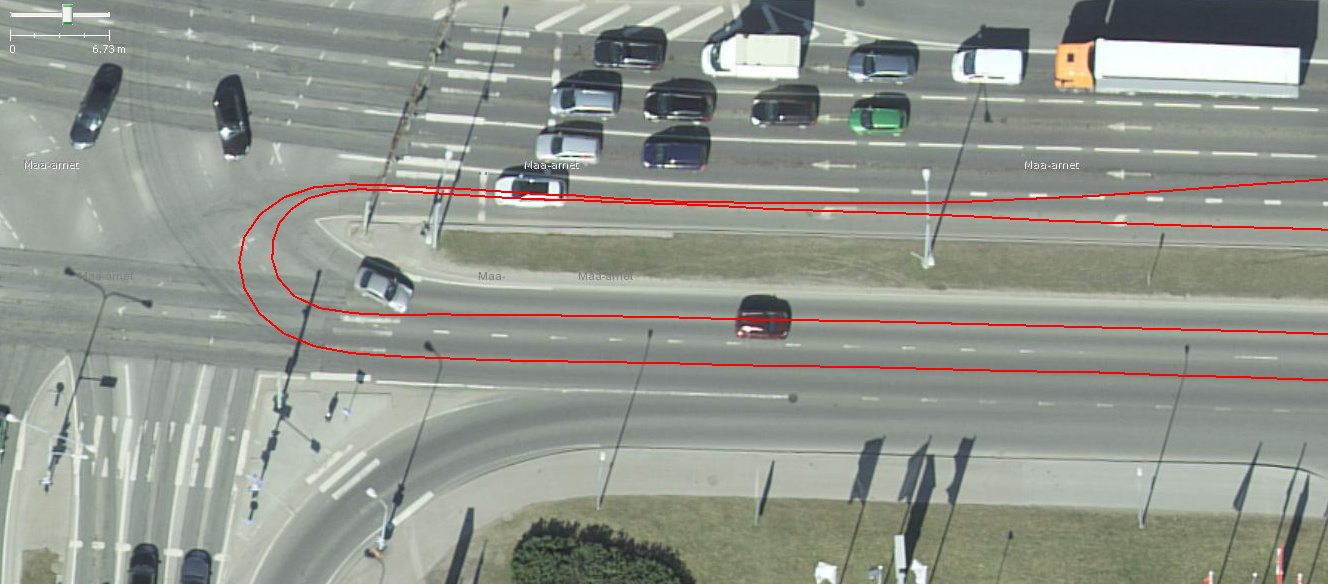
Спасибо за такой позитивный отзыв. Давно не было так радостно от чьих-то побед. Пример трека тоже очень позитивный, в городе чисто-спутниковая навигация такого никогда не даст, прямо с радиусами. На меньших радиусах разница ИНС еще больше заметна, но для этого надо импульсы брать с заднего правого колеса, если осевые линии дорог уже есть и нужны газончики и бордюрные камни. Ехать нужно тоже соответствующе - правее ![]()
Про пожелания:
- Я сам удивился насколько меньше проблем в жизни становится если в автомобильном девайсе не делать питание от 12В.
 Надо пересмотреть эту позицию с учетом современного китаепрома. Уже несколько установок было через 5в преобразователь.
Надо пересмотреть эту позицию с учетом современного китаепрома. Уже несколько установок было через 5в преобразователь. - Можно сделать BT и RS232 одновременно. Мешает то что прямо на самом чипе второй выход физически USB, с работой с фирменными драйверами, виртуальным портом в компе итп. Его переделать назад в rs-232 - это целая история с риском получить кирпич. Bluetooth возможно проще.
- UART в TTL тоже несложно вывести, но места не так много, кроме того есть компоновочные проблемы: каждый лишний порт шумит, а RF-часть, а особенно цепи гироскопа очень боятся таких шумов. Получается что страдают люди, которым не нужен UART. Есть идейка как этого всего избежать - сделать байпасс на max 12в, чтобы без него выводить ttl напрямую на разьем db-9. А BT при этом повесить на USB. Так может быть шанс сохранить уникальные характеристики всей коробочки по основному показателю - чувствительности приема GPS.
- Тоже было в планах поковыряться в HC-05, в некоторых версиях HC-06. Пока они находятся в режиме “темный лес” - либо работают, либо не работают. Как нерабочий перепрошить и настроить пока не приходилось разбираться.
Вобщем посмотрим что радиоэлектронный рынок предложит “10 лет спустя”. Если получится собрать комплектуху, то к НГ можно будет что-нибудь замутить ![]()
Немаловажно также настроить частоту NMEA хотя бы на 5Гц, иначе этой красоты по-умолчанию не видно. Но чтобы это сделать, придётся ещё перенастроить скорость порта, а чтобы не потерять при этом BT, надо ещё и перенастроить HC-05. Мне не сложно, но не все такие, как я.
Нет, я имел в виду все 3 оставить! BT и RS232 повесить на один порт. Один из них оставить только на передачу, чтобы не конфликтовали, и вывести на плате перемычку, какой из них пользователь хочет на приём команд, если хочет использовать u-center с одним из этих портов.
У вас там на плате пустые площади такие, что коня можно валять. Я приклеил преобразователь просто на пустое место, и там осталось ещё столько, что ардуина целый МК поместится с гнездом под MicroSD, чтобы коробка сама треки писала. Что, собственно, я и думаю сделать следующим шагом.
А ещё, на днях я планирую поставить мелкую ардуинку, чтобы суммировать импульсы с обоих колёс. Это должно быть не только точнее, но и позволит с чистой совестью писать трек посередине машины, а не слева или справа.
И вот вам ещё:
5) Сделать два входа для импульсов для тех, кто подключается к ABS датчикам. Припаиваем какой-нибудь мелкий AVR контроллер, и пишем код, который будет суммировать импульсы.
- Порт 115200 и любые герцы идут штатно через USB. Гнать все это через uart+max12+rs232+HC-05+bluetooth+мобилко-на-андроиде мягко говоря неоптимальная конструкция. Как говорится велком в клуб pccar.ru. Но я не настаиваю, каждый вправе извращаться как угодно в пределах своей компетенции

- Идея ясна, можно сделать чуть другой формы переходник и пропилить дырку под BT над DB-9. Немного больше фонит. Перемычки - вот они сильно фонят, неприятно. Надо подумать. А нельзя просто все запараллелить и Rx и Tx? Просто не отправлять ничего туда и не будет путаницы.
- Это не пустые площади. Это только с точки зрения цифровой техники они “пустые”. К сожалению много очень квалифицированного народа нарвалось на крупные проблемы из-за такого восприятия. Вплоть до нерабочих схем. Если Вы посмотрите шумы и как от них защищаться, но становится понятным принцип экранирования и взаимного расположения деталей. Вся плата в заземлениях и металлизированных отверстиях, думаете от хорошей жизни? Вам еще провезло что питалово стоит в секторе питалова т.е. изначально шумном, как USB. Если такие вещи ставить со стороны гироскопа АЦП или RF тракта, все капец, прибор теряет примерно все.
- Так и не понял зачеи нужен трек “постереди машины”. Вы там порядовку делаете в карте? Обычно нужна либо осевая линия дороги, либо контурная асфальта-газона. Это я как градостроитель говорю. Осевая как раз практически на левом колесе идет, контур дороги на правом. Столько возни из-за странной линии. Кроме того есть еще в градостроительном софте функция offset - создание параллельных кривых. В случае ИНС треков заметно более продуктивный метод с развитыми возможностями по сравнению с осью машины. Еще есть гениальное место для осевой линии (я оттуда брал) - датчик вращения выходного вала КПП, до дифференциала. Конструкционно от abs не отличается ничем.
- Тут может оказаться превышение предельной частоты. Надо будет поискать в ТТХ, было где-то.
Опять вы меня не поняли. ublox не даёт отдельно выбрать частоту для USB, отдельно для UART. Если я поставил 5Гц - оно везде будет 5Гц, независимо от того, нужно мне оно на bluetooth, или нет. Поэтому единственный выход для bluetooth - мириться с этим, и передавать тоже на 5Гц. А в дефолтные 9600 5Гц никак не влазят.
Но, справедливости ради, мне нравится, как плавно и точно поворачивается карта в османде на телефоне, когда данные передаются на 5Гц. Если оно работает, и работает хорошо, то какие аргументы против?
Тогда надо развязать их с помощью подтяжки и двух диодов, дабы они не устроили КЗ в попытках установить линию в разное состояние.
Попробуйте накрыть чувствительные тракты металлическими экранами типа таких.
Ну и наконец, кардинально вопросы помех решают банальные 4-х слойки со слошными слоями массы и питания внутри.
{kind=link}
А я не понял, как вы машиной бордюры измеряете. Всё равно у вас какой-то offset будет, если только не ехать колесом поверх самого бордюра. Да и из кабины ж не видно точное расстояние между колесом и бордюром, оно же плавать будет.
На вас водители странно не смотрят, когда вы колесом по разделительной полосе или бордюру едете? И не точнее ли получится, если проехать туда, обратно, и вычислить осевую линию между двумя треками? Держать машину по центру полосы гораздо легче, чем одним колесом куда-либо.
Плохое место. Ведущие колёса могут пробуксовывать, когда трогаешься. Задние в этом плане надёжнее.
Ну, я не градостроитель, и бордюры у нас и так по снимкам нарисовать можно. Задачи с GPS у всех разные.
Добавил выход для подключения ардуины (UART и 5V):
http://svimik.com/IMG_20190730_191509.jpg
http://svimik.com/IMG_20190730_194431.jpg
{kind=link}
{kind=link}
Сделал сумматор импульсов, чтобы использовать оба задних колеса:
http://svimik.com/IMG_20190730_192442.jpg
http://svimik.com/IMG_20190730_202410.jpg
Код можно взять здесь: https://gist.github.com/SviMik/9b7d5af135ae5ea2b234d6699f818c67
{kind=link}
{kind=link}
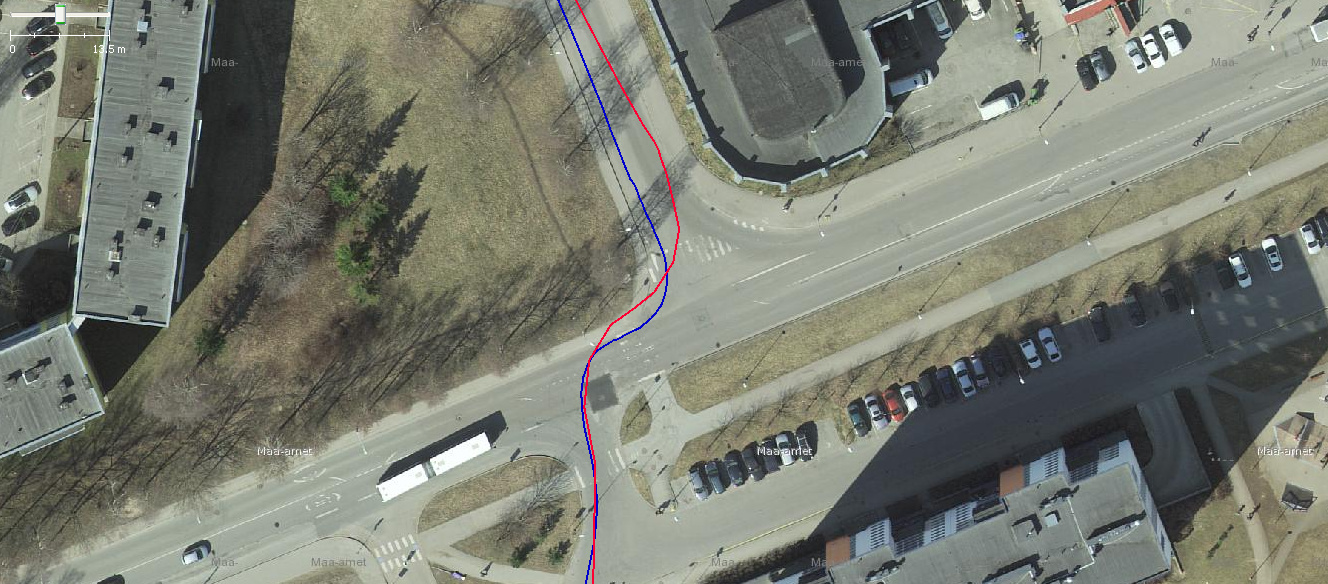
Тест в туннеле:
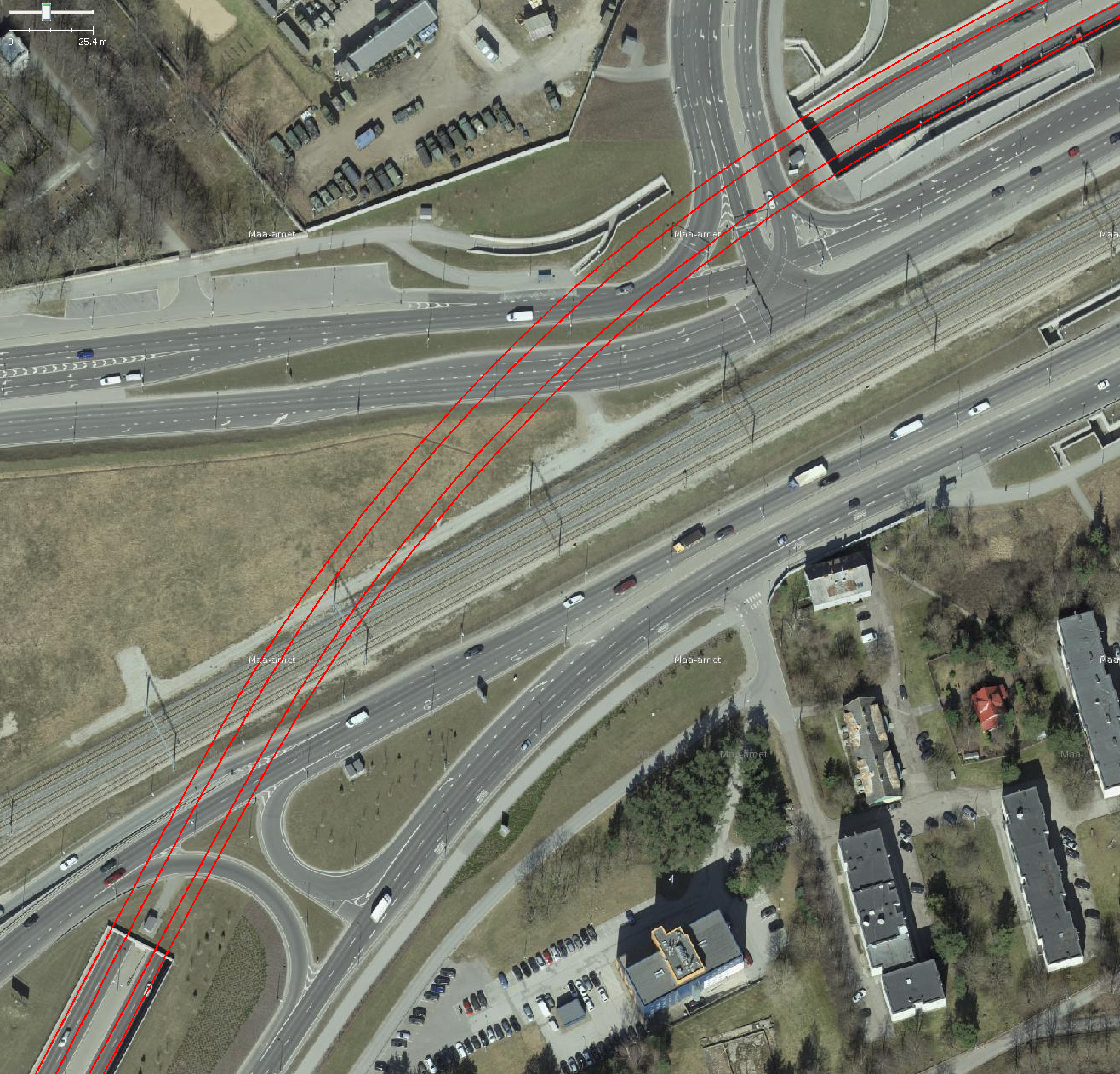
Разворот в первую и вторую полосу.
Этот снимок пришлось сместить под трек, что-то он аж на 7 метров уехал ![]()
Далее все снимки пойдут как есть, без смещения. Похоже, какой-то одиночный косяк Maa-amet.
Сравнение с GPS в телефоне:

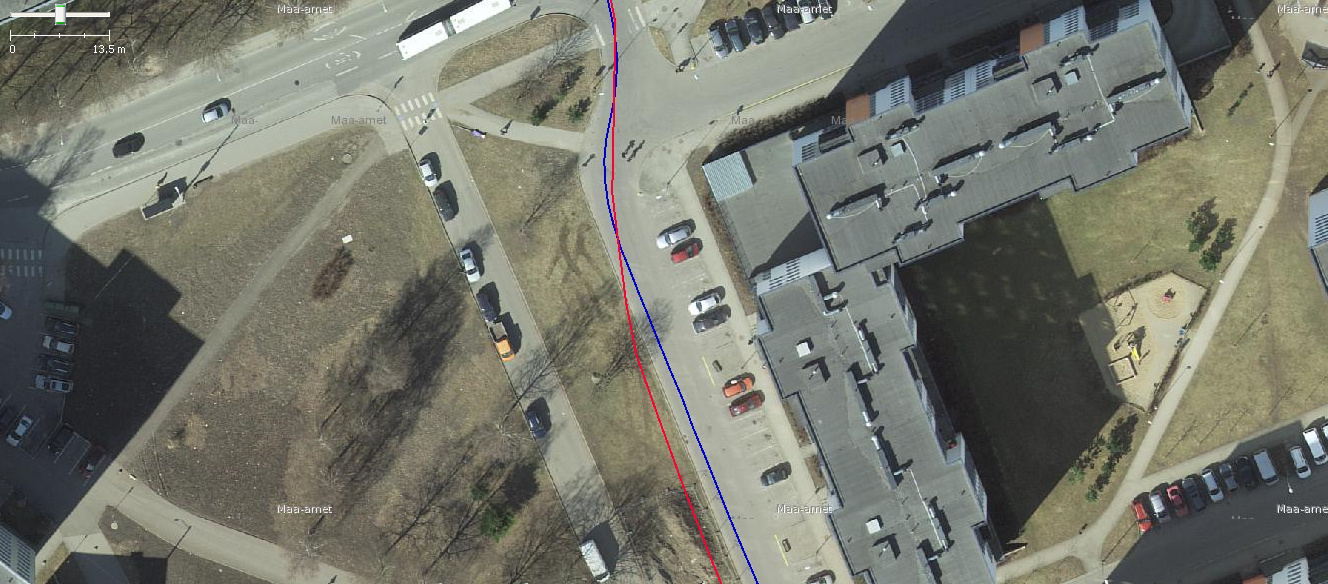
Тут телефон поймал последнюю точку у форточки:
Круть крутецкая. Мы читаем и молча завидуем))
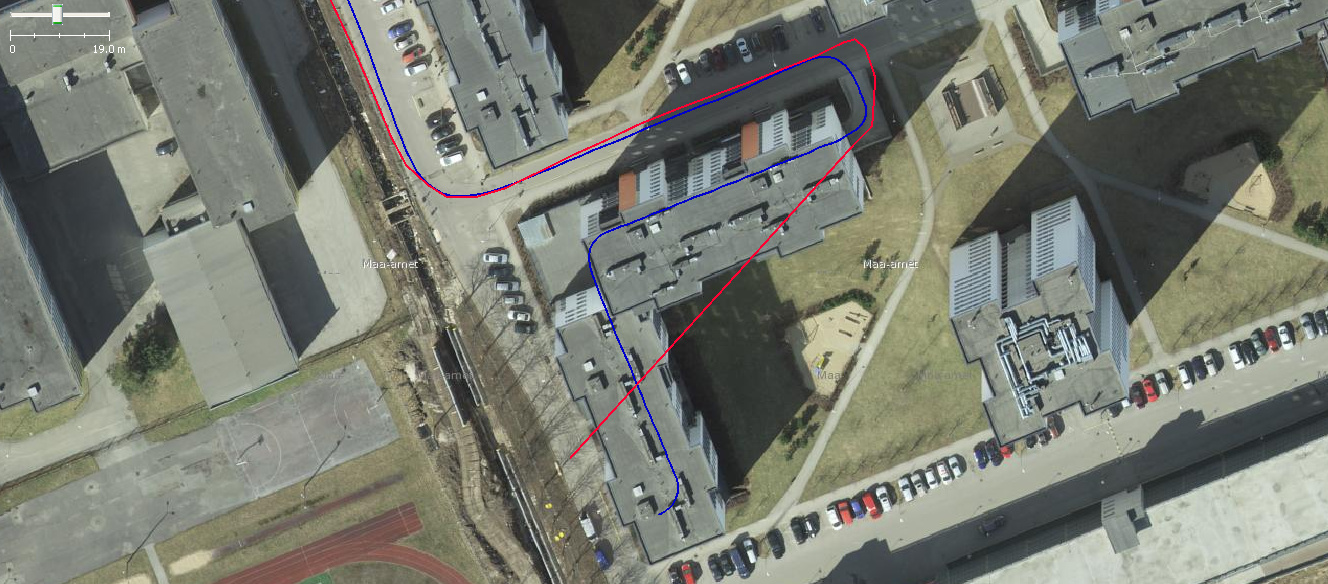
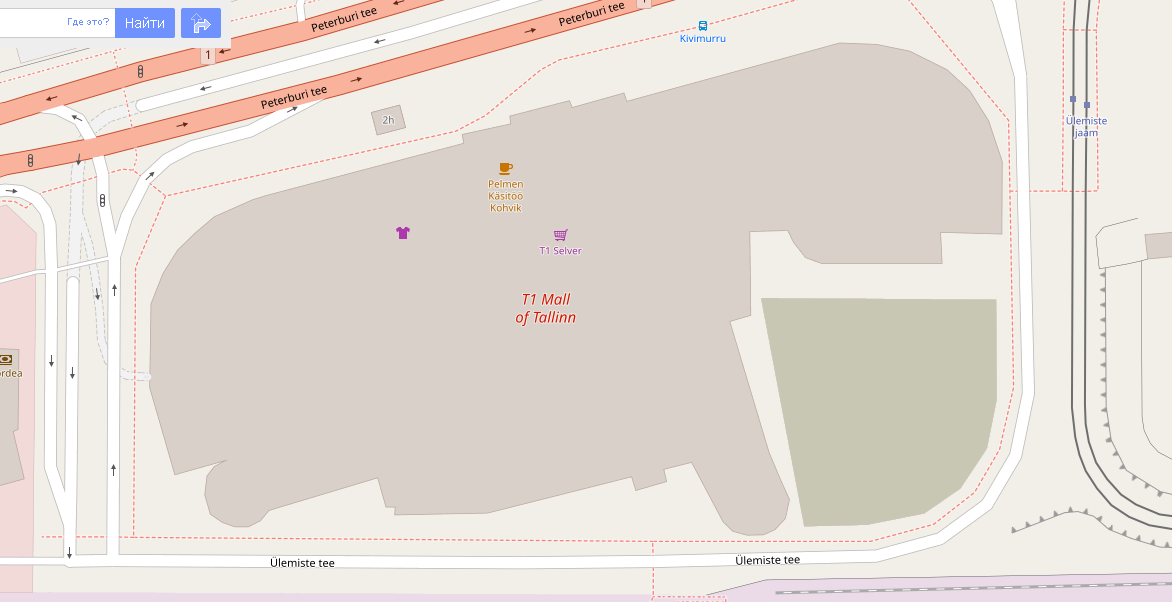
Вот вам и первая success story: T1 Mall of Tallinn
Изначально это выглядело так:
Далее, я проехался там со своим новым девайсом, и получил вот такие треки:

Итоговый результат:
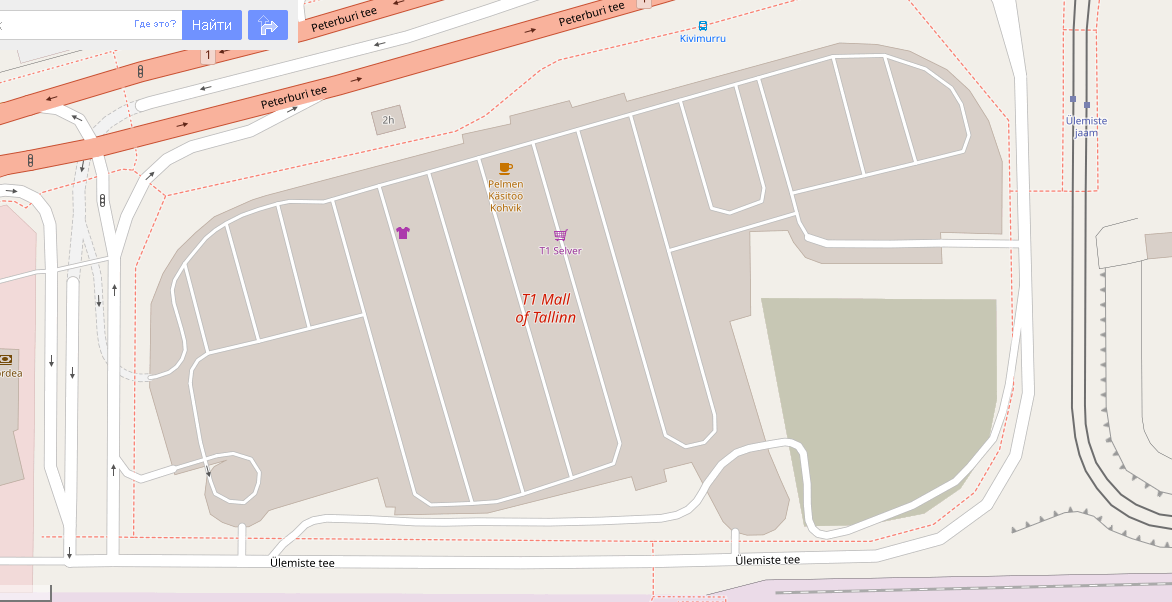
В принципе, такое здание - это предел возможностей девайса. И то, я выныривал из него три раза, чтобы поймать GPS.
В первый раз я попытался замапить вообще всё за один заход. За 15 минут набежала ошибка в 5 метров. На скрине выше видно, что линии уже начали ехать. Потом стал периодически выныривать, чтобы поймать GPS. После этого выработал тактику: отдельно проезжать здание насквозь по кратчайшему пути, чтобы точнее замапить все въезды, выезды, и главные проезды. Потом уже развлекаться со всякими parking_aisle.
Красота!
Интересно, к велокомпьютеру можно подключить? ![]()
Да, уж красота. Всеж датчики ABS супер-качественную инфу для счисления пути поставляют! ![]()
Дык, так инерциалки все только так и работают — надо иногда выныривать для уточнения позиции ![]()
Можно, если сделать четырехколесный велик, который повороты без крена проходит. ![]()
Не, мой двухколёсный и с креном, хотя на море на чём-то подобном катались по набережной https://strongpeople.ru/velomobili/modeli-dlja-kommercheskogo-ispolzovanija/chetyrekhmestnyy-velomobil-infanteriya/ там точно крена не было, надо брать ![]()
Можно попробовать поставить девайс на электронный стабилизатор для камеры, чтобы он всегда был горизонтальным.
Ну или уговорить автора ещё раз попробовать 6-осевые сенсоры, может что-то интересное на рынке появилось.
-
С шестиосевыми гиррскопами есть одна большая проблема — вы получаете огромный поток ненужной информации, 90% из нее невозможно очистить от мусора изза тряски, но для работы системы нужно и достаточно одной оси - Ζ. То есть добавляется огромное количество ресурсов, а качество информации не становится лучше. Задача определения горизонта впринципе нерешаема в mems гироскопах на подвижной платформе, как и задача определения нулевой скорости при остановке в mems линейных акселерометрах. Изза шумов все уходит и уплывает.
-
Да, гиростабилизированные платформы это интересно и может помочь, втч и гимбалы от камер. Только опять важно не связываться с трехосевыми подвесами иначе они “сожрут” информацию о повороте транспортного средства вокруг оси Z и вся затея потеряет всякий смысл.
Отсюда вывод - круче mems могут быть большие гироскопы, механически-вращающиеся, лазерные, волоконно-оптические, какие угодно, но только в микросхемах ловить больше нечего. Да, и пульсы одометра заменить нечем по той-же причине.