Случайно нашел ответ, оказывается одометр можно подключать не только аналоговым сигналом, но и цифровым значением через компорт!
Да, парконы вкурсе инерциальных систем и интересуются темой еще со времен четвертого чипа ю-блокс. Но у них весь бизнес крив изначально. Во-превых сама идея платных парковок родилась для дого чтобы навести в городе порядок. Парконы работают в обратном направлении - плодят и развивают бардак. Даже люди заплатившие деньги на парковке парконов часто оказываются в зоне действия знака “ОСТАНОВКА ЗАПРЕЩЕНА” установленного ГИБДД и эту машину благополучно увозит эвакуатор, прямо с Садового кольца со всеми вытекающими. Доказывать что я не верблюд нереально, ни ГИБДД, ни парконам. Это конкурирующие бизнес-единицы и таких глюков море. Кроме того кому-то из начальства нужна галочка “глонасс”, а ю-блокс делает множество чипов, и четырехсистемые с глонассом, но не делает с дед реконингом - опять облом. Ну и на последок разочаровавшись в точности четвертого чипа они уже не стали рассматирвать шестой чип с прошивкой 7.03ADR, который точнее на порядок и не стали вообще разбираться в методиках получения субметровой точности. Вообще разбираться в деталях - это не главный конек современного бизнеса.
![]()
Из CAN-шины они кстати очень приличные результаты получили, рыло-в-рыло шли с четверным чипом от ю-блокса. Не знаю почему у них не пошло.
Ох и верно говорят: “не показывай дураку половину работы”.
Распечатаю и заламинирую.
Добрый день!
Ребят, подскажите пожалуйста. Я наверно не по адресу, но это единственная русскоязычная ветка форума по данной проблеме, которую мне удалось найти.
У меня есть Arduino Mega 2560, есть GPS shield Ublox NEO-6M и 3-осевой гироскоп/акселерометр GY-521 MPU-6050.
Задача объединить gps и imu на платформе Arduino и получить gps-трекер с поправками от imu.
Понимаю, что задача не тривиальная, но может кто-то поделится информацией или ссылками по данной тематике если таковые имеются?
Гугл к сожаленью мне не помог…
kztp
Ключевые фразы для поиска “kalman filtering”, “dead reckoning”
Вот, например http://www.instructables.com/id/Guide-to-gyro-and-accelerometer-with-Arduino-inclu/
(добавлено: там оказывается без GPS)
Сразу следует отметить что у Вас и близко не получится результатов соизмеримых с u-Blox R-серии т.к. изначально компромиссный подход - взять готовые координаты (которые уже есть результат работы фильтра) и подмешать к ним инерциальный датчик. Т.е. в ситуациях когда есть прием 2-3 спутников ваша система полностью перейдёт в автономный режим, в то время как 6R продолжит использовать имеющиеся спутники.
chnav,
спасибо Вам за ответ, буду гуглить дальше. Я уже использую фильтр калмана при обработке результатов imu, теперь осталось туда прикрутить gps. Железо я одолжил (ардуино, gps, imu), так что выбирать особо не приходилось. Пока что идеальных результатов я не жду, мне бы сначала всё это запустить и оценить результаты, потом буду думать что делать дальше.
Добавил в вики ссылку на дипломную работу по интеграции INS и RTKLIB
http://publications.lib.chalmers.se/records/fulltext/200466/200466.pdf
u-blox тем временем уже продает EVK-M8L, но документации не показывает,
и судя по отсутствию разъема для CAN это все-таки не совсем
окончательное решение проблемы.
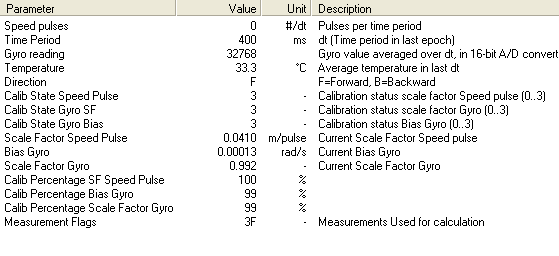
Исходная информация для DR на таком девайсе:
http://electronics360.globalspec.com/article/2256/volkswagen-7p6-035-670-3g-mmi-unit-by-harman-becker-teardown
http://www.electronicproducts.com/Volkswagen_3G_MMI_Unit_by_Harman_Becker-whatsinside_text-138.aspx
ReverseGear и WheelCounter/AllWheels приходят скорее всего с CAN шины,
GPS это antaris4/ublox6,
InternalGyro Epson Toyocom XV-8000LK Gyroscope - 3-Axis, 20 Degrees Inclined Angles, 10MHz
Internal3Daccelerometer ?
Temperature NXP LM75ADP Temperature Sensor - Digital, 0.125C Resolution, w/ 11-Bit ADC
0x00021000 sensor/Gyro/InternalGyro
0x00021005 sensor/WheelCounter/AllWheels
0x00021009 sensor/Accelerometer/Internal3Daccelerometer
0x00021006 sensor/ReverseGear
0x00021008 sensor/Temperature
0x0002101d sensor/GPS/LowLevel
0x0002100a sensor/GPS/Latitude
0x0002100b sensor/GPS/Longitude
0x0002100c sensor/GPS/Height
0x0002100d sensor/GPS/Heading
0x0002100e sensor/GPS/Speed
0x0002100f sensor/GPS/Time
0x00021010 sensor/GPS/Date
0x00021011 sensor/GPS/Fix
0x00021012 sensor/GPS/HDOP
0x00021013 sensor/GPS/PDOP
0x00021014 sensor/GPS/VDOP
0x00021015 sensor/GPS/AntennaState
0x00021016 sensor/GPS/SignalQuality
0x00021017 sensor/GPS/SatellitesUsed
0x00021018 sensor/GPS/SatellitesVisible
0x00021019 sensor/GPS/HorizontalPositionError
0x0002101a sensor/GPS/VerticalPositionError
0x0002101b sensor/GPS/AllGps
0x0002101c sensor/GPS/SatelliteInfo
0x00021021 sensor/GPS/NorthSpeed
0x00021022 sensor/GPS/EastSpeed
0x00021023 sensor/GPS/VerticalSpeed
0x0002101f sensor/Version/Identifier
0x00021020 sensor/Version/Date
Апдейт 2017. Остались коллекцонные образцы устройств всех поколений, lea-4r, lea-6r и восьмого. Восьмерки оказались глючные и не работают с u-center. Может по причине ненашего исполнения? У нас все работает. Все устройства питаются по usb-b (квадратный разъем, 5в). Интерфейсы на выбор, либо com+usb, либо usb+bluetooth. Оба порта работают одновременно. Можно треки писать с юсб, а андроид телефон подключить через bluetooth gps.
Кто-то ещё этой темой занимается?
Что-то я сейчас потыкался по ебею и алиэкспрессу, результаты неутешительные:
- LEA 6R: На ебее только голый чип, варианта с платами нет. На алиэкспрессе есть одна квадратная плата с антенной без фотографии обратной стороны, сильно смахивает на фейк.
- NEO M8L: На ебее ничего, на алиэкспрессе продают один чип, и тот фейк.
- EVK M8L: Нет нигде.
- NEO M8U (не совсем нормальный DR - к машине не подсоединяется, но заявляет, что со встроенными сенсорами это и не надо): На ебее только голый чип, на алиэкспрессе тоже, но там к тому же похоже ещё и смахивает на фейк.
- Устройство, которое разрабатывал господин постом выше: сайт дохлый, на форуме последний пост год назад, статус проекта не понятен.
Есть сейчас в продаже какие-то готовые платы, чтобы оставалось только подключить и поехать?
Человек делал это на голом энтузиазме по себестоимости. Интереса у публики это не вызвало, грех теперь жаловаться “дохлый - не дохлый”.
Хобби обычно такое дело - добился успеха и пошёл дальше.
- Чистейшая правда, 12 лет назад именно так все и было, потому собственно и появился проект. Не для продажи, а для себя лично. Ну и если кто поучаствовать хочет - велком.
- Есть восьмой чип, в evaluation kit, очень дорого, там какой-то косяк с памятью, не запоминает настройки а без них фактически валяется на полке без дела. Техподдержка не стала утреждать себя ответами.
- Ну у меня есть и что толку с того? Нерабочая вещь впринципе.
- ИМХО это как с багажом в шереметьево. В дело вмешались “эффективные” менеджеры. Маркетолухи сказали что продажи сдерживает гиморойность подключения ко всем этим каншинам в машинах, сделайте автономку. Ну сделали. Но показывает она КМК хрень потому что она даже нулевую скорость не может определить изза дрейфа, т.е. разница с неИНС GPS исчезающая. Смысла GPS с гироскопом и одометром потерян совсем со всеми вытекающими. Из связки гироскоп-одометр именно последний суперточный прибор. Эти все mems гироскопы - оборудование бытового класса и без серьезной поддержки, в “автономке” ничего толком сказать не могут.
- Для меня лично остается загадкой как люди отличают “дохлый сайт” от “недохлого”. Интерес действительно минимальный, сидеть там смысла нет, но в личке неотвеченных сообзений никогда не было. Отсюда с осм вообще уведомления приходят. Спрашивайте, отвечаем. Пару приборов может и осталось, именно в таком виде “подключить и поехать”. Собственно из-за этого и был весь сыр-бор.
Из новостей чисто реакция на автопром. Машин без CAN-шины уже практически нет, т.е. это фактически последний канал связи с машиной. Поэтому просто нужен переходник со штатными разъемами авто. На выходе нужены speedpulse и задний ход. Хотите свой доставайте, хотите я закажу за границей. Это долго и дорого. Готовые решения плюс-минус в наличии есть на WV и Hyundai, подешевле и побыстрее. Сложнее всего с машинами типа старого Кайроном. Месяца два шел переходник этой зимой, но все заработало с первого раза. Установочная студия классно все установила.


Не то чтобы не вызвало, но все кому надо было - получили. Последние годы - да, единичные фанаты появляются, но это просто время такое - “разбираться в деталях - не главный конек современного бизнеса” :D:D:D
Понятно. Значит, произошло недопонимание. Я-то за проектом посматривал, но помню, он был в статусе разработки и прототипирования. Думал - подожду, когда оно будет в статусе “запущено серийное производство, можно заказать на сайте”. Не знал, что этого и не планировалось.
- Перехожу по ссылке в вашей подписи
- Нажимаю на ссылку “Сайт” в шапке форума
- Firefox can’t find the server at dr.unoforum.ru.
- ???
- Сайт дохлый.
У меня в Шкоде speedpulse доступен прямо с датчиков ABS (уже игрался с ним, подключая к ардуине). Задний ход могу взять с фары заднего хода. Выходит, не нужен мне ни CAN, ни переходник.
А можно мне тоже? ![]() Просто, тут такое дело… сами видите, в какой стране я живу
Просто, тут такое дело… сами видите, в какой стране я живу ![]()
У ublox появилась весьма интересный чип ZED-F9K
Обещают GPS, GLONASS, Galileo и BeiDou, причём все четыре могут работать одновременно. И, вроде как, он двухдиапазонный? Вижу там L2 в списке диапазонов. Ну и dead reckoning, само собой, имеется.
По описанию - убойная штука. Жаль, с суффиксом K в продаже не вижу. На ебее есть ZED-F9P за $244, но он без DR. Но даже он обещает “centimeter level accuracy in seconds”.
Кто-нибудь тестировал?
1.Странно, проверил все работает. Может сайт заблокирован там? Можно еще на этом форуме под аватаркой нажать кнопочку “Email”
-
с ABS заднего колеса сигналы - это прекрасно. Главное чтобы после подключения сам ABS не выключился. Там маловат уровень сигнала, можно поднять транзисторным ключиком или еще чем, не знаю как но одобряю - если брать прямые данные о положении колеса, да еще и вовремя, без CAN-задержек - получается самая точная информация, лучше всего все ИНСы работают, мои и не мои.
-
Очень уважаю в какой стране, правда последний раз был лет 40 назад
 , кстати есть оказия на днях до кик-ин-де-кёк. Если устроит и успею собрать и проверить. Всеже лучше через личку на том сайте про детали.
, кстати есть оказия на днях до кик-ин-де-кёк. Если устроит и успею собрать и проверить. Всеже лучше через личку на том сайте про детали.
Ардуину уже подключал, ABS продолжает функционировать. В Шкоде там запас по уровню сигнала приличный.
Написал в личку модератору.
Девайс получил, всё супер!
Калибровка 100%, 99%, 99%, на калибровку хватило 30 мин (проехал 25км).
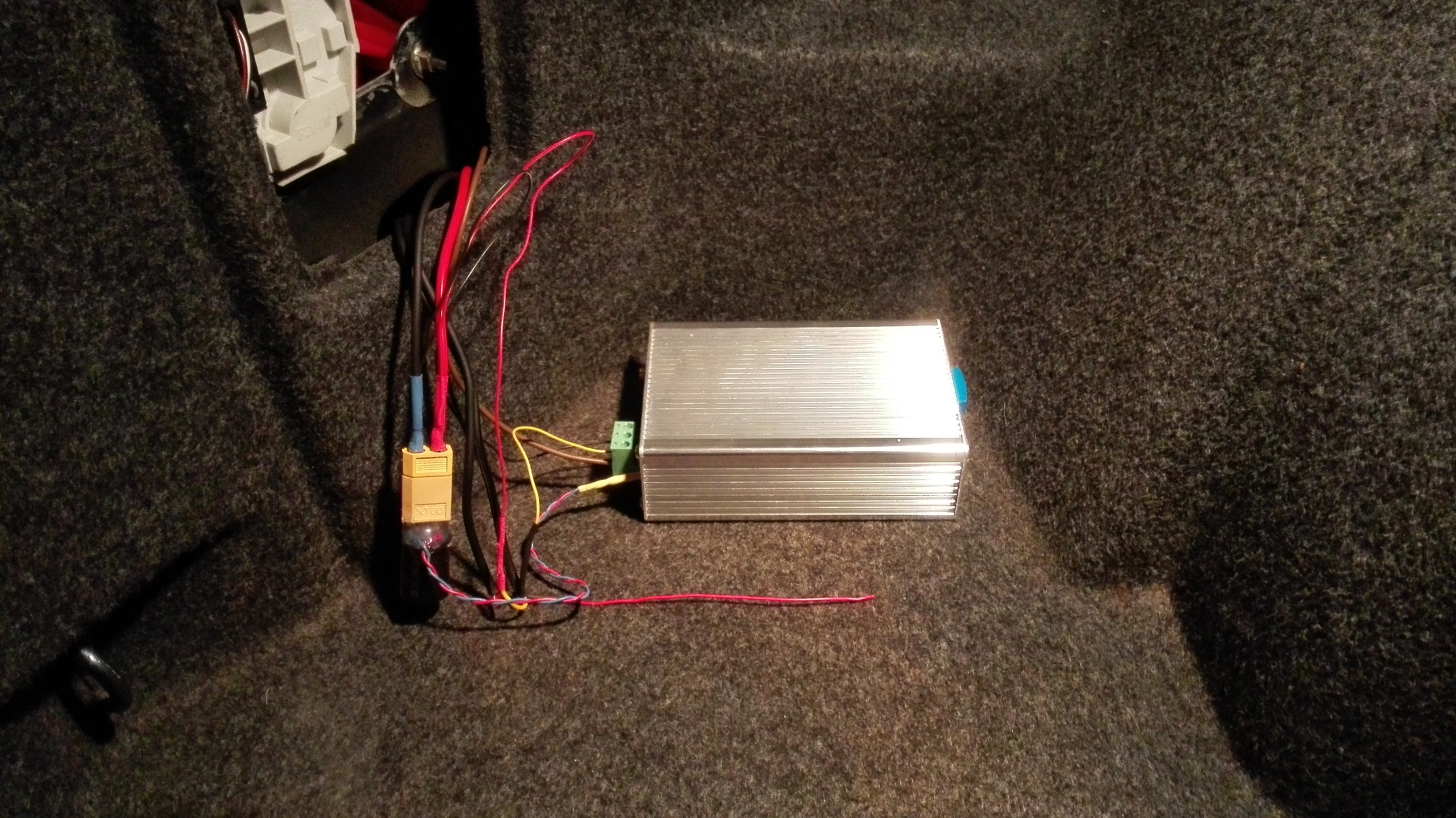
Из модификаций: сразу встроил преобразователь, чтобы питать от 12V:
http://svimik.com/IMG_20190727_095644.jpg
http://svimik.com/IMG_20190727_202135.jpg
Питание через USB меня не устроило, потому что я хочу туда подключать ноут, но при этом я не хочу, чтобы Bluetooth соединение переставало работать, когда ноут я отключаю.
{kind=link}
{kind=link}
Внимание: Устройство может уходить в спячку в момент отключения USB даже при автономном питании. Долго думал, от чего такое поведение: воткнул USB, вынул USB, и по Bluetooth данные перестают отправляться. Чтобы этого не происходило, надо в настройках в разделе USB выбрать вариант Self Powered. Не забудьте сохранить конфигурацию.
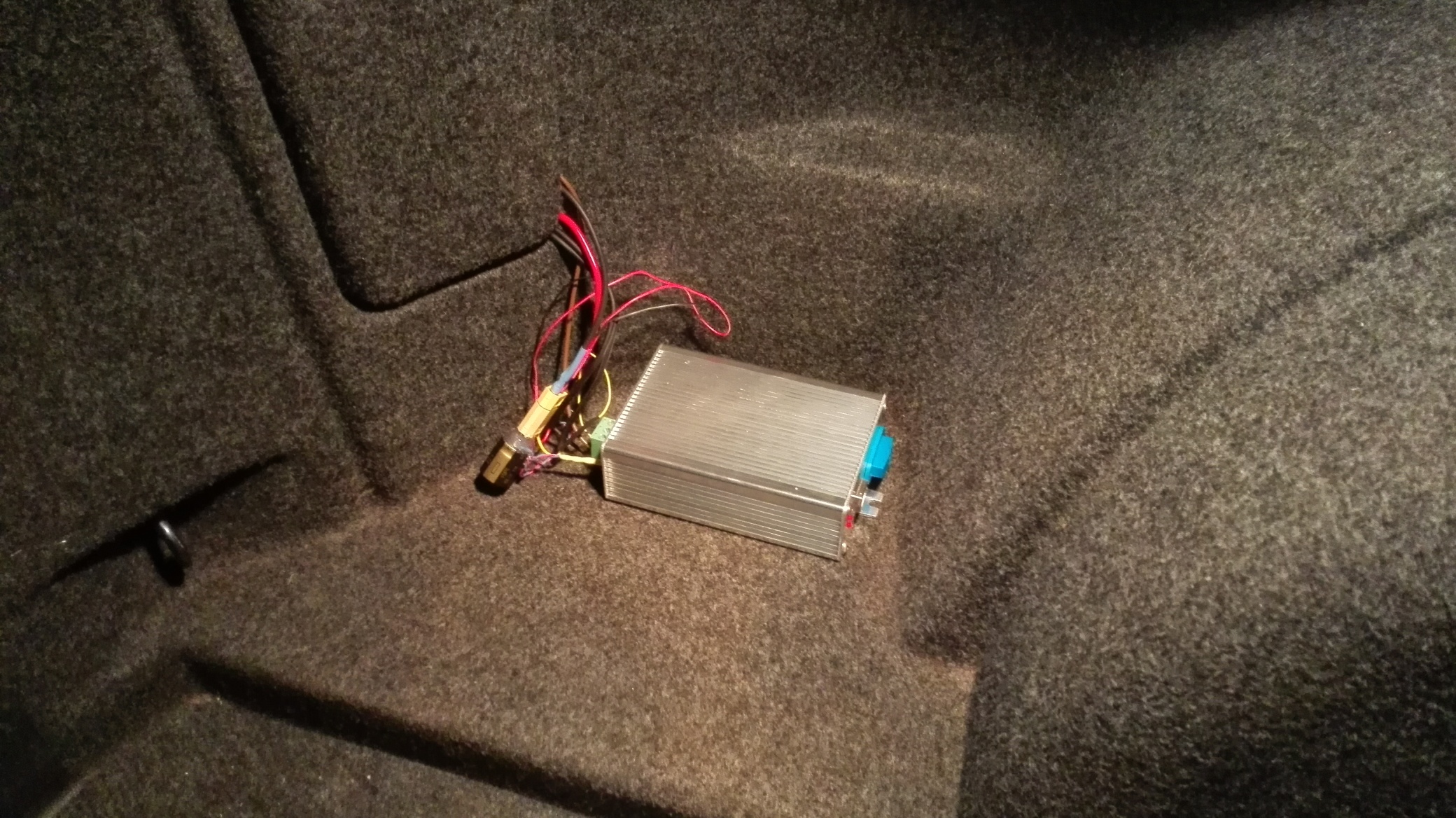
Установка: в багажнике слева:
http://svimik.com/IMG_20190727_232050.jpg
http://svimik.com/IMG_20190727_232426.jpg
{kind=link}
{kind=link}
Подключение: реверс - к фаре заднего хода, импульсы - к датчику ABS заднего колеса, используя дополнительную схему для согласования:
http://svimik.com/IMG_20190727_231032.jpg
Для Skoda Fabia схема будет состоять из оптопары и резистора 100ом паралельно ей. Схема подключается в разрыв датчика.
Имейте в виду, что у других автомобилей датчики ABS не такие, и схема там будет посложнее.
{kind=link}
Пример трека:

Пожелания автору схемы:
- Добавить разъём для питания от 12V. Иронично, что в автомобильном устройстве нет входа для питания от автомобильной бортовой сети.
- Приделать BT и RS232 разъём одновременно. Не знаю, что мешает так сделать.
- Вывести UART разъём для подключения ардуины или другого МК (+5V, GND, TX, RX).
- Сразу настроить HC-05 на нормальное название (например, GPS) и нормальную скорость (например, 115200), иначе даже 4Гц туда не пролазит. Так мало того, что не пролазит туда, так ublox начинает и на USB пакеты терять из-за этого. Вся настройка занимает 5 минут, но требует переходника UART-USB, которого у кого-то может и не быть.