Не очень понял этот комментарий. Разве напильником получилось бы лучше?
Нет, был конечно вариант отфрезеровать из аллюминия, как это я сделал с лазерной указкой, но боюсь, в таком корпусе приём сигнала точно будет никакой Да и возить металлический корпус по машине не очень хочется…
Если кому интересно, новые файлы для анализа: http://svimik.com/rtk2.zip
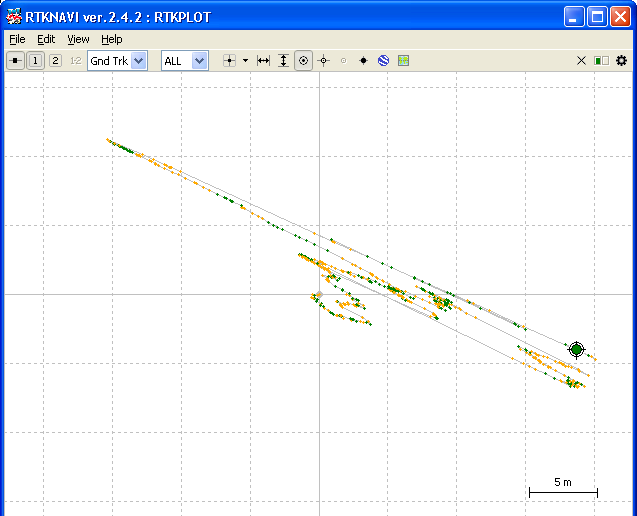
Проехал тот же трек, но с антеной на крыше.
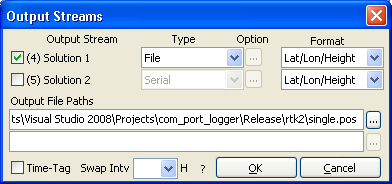
В архиве также есть base.log - это то, что выдавал NTRIP во время стоянки. Понять бы, почему с ним ничего не вышло…
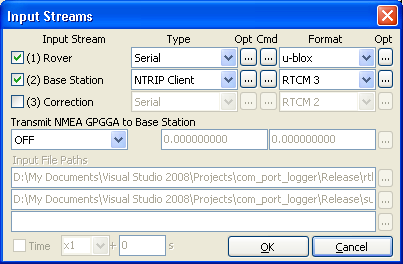
Насчёт опции -c также есть вопросы. Я её убрал, чтобы посмотреть, как бы вёл себя RTK в реальном времени. С опцией -c получилось как и говорили, во время стоянки перед поездкой был fixed.
Когда -с убрал, получилось с точностью до наоборот - пока стоял на парковке, решение было float, отъехал - пошло fixed.
Кстати, во время езды почему-то прыгает между fixed и float, хотя я не останавливался… Как это объяснить?
Где б их взять тогда… Самому выяснять, поставив базу в роль ровера?
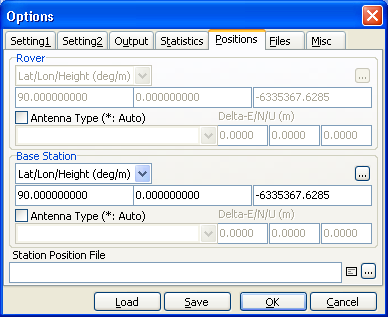
Позиции базы тут http://www.epncb.oma.be/_productsservices/coordinates/crd4station.php?station=SUR4
(чтобы ничего не считать, можно посмотреть последнюю таблицу, которая действительна сейчас).
Про корпус - ну лично я бы это выпилил из нескольких кусков оргстекла, например.
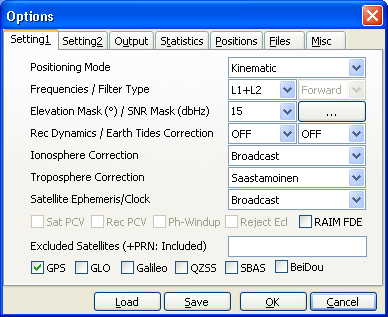
Настройки вроде похожи на правду. Но получается, что все же fixed и float решения получались, а не только single? Или это только в PPP-Kinematic они получились?
Если float/fixed дергается туда-сюда - это вообще нормально при таких условиях, потому как они плавают где-то на границе допустимого и совершенно непостоянны.
Вообще, не тех же. Постпроцессинг я делаю из командной строки (и всё работает), а когда пытаюсь юзать графический интерфейс - не работает ничего, и постпроцессинг тоже в тот раз не получилось.
А возможно ли на NEO-6M заставить работать DR? По аналогии как заставили его выдавать сырые измерения…
Хотя, в отличии от RAW сообщений, я не вижу, чтобы из DR функций было что-то заблокировано, все галочки без вопросов включаются… в чём подвох?
Насколько я вижу в описании протокола, приёмнику начиная с версии 7.01 можно скармливать RTCM 2.3 напрямую. Кто-нибудь пробовал?
Интересно, насколько это плохо… Или мой приёмник по определению не может принять что-то, что не видит EUREF станция?
Это становится проблемой только когда до станции несколько сотен километров, даже под тысячу, тогда созвездие может значительно отличаться. Если станция рядом - максимум будет отличаться на 1-2 спутника.
У прошивки 7.03 есть несколько DR сообщений, которые отключены.
Их в принципе можно активировать, но даже если это удастся, будет работать
только DWT (дифференциальный wheeltick, без гироскопа), и никакой адекватной документации нет: надо экспериментировать.
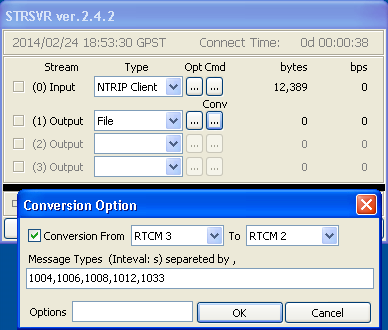
Попробовал strsvr для конвертации из RTCM 3 в RTCM 2, но ничего не выходит.
Если Message types оставлять пустым, то он выдаёт на выходе ровно то же, что и на входе.
Если перечислить сообщения (пробвал и номера из 2 и из 3 версии), то вообще ничего не выдаёт.
Не исключено что тогда координаты брались из заголовка obs-файла базы. Посмотрите туда - отличаются ли они от тех что на сайте EUREF? Во многих случаях они там приблизительные, но не исключено, что в вашем случае - точные.
Ну выже вроде с математикой дружите, так что понимаете, что точность зависит от полноты информации для решения.
Для полноты картины пригодилась бы диаграмма видимости спутников - есть там такая опция. Смею предположить, что окно выходит на северо-запад или юго-восток?
Да, изначально RTK мне представлялся как инструмент, который либо даёт координаты с дециметровой точностью, либо сразу сообщает, что этого сделать не может.
А теперь выходит, что FIX недостаточно, и нужно искать какую-то новую метрику, чтобы знать, когда его решению доверять, а когда нет.
Подоконник у меня юго-восточный, да С бОльшим уклоном на юг.