В таком случае можете сразу отказаться от RTK. Вся логистика при работе с RTK построена таким образом чтобы создать для процесса съемки идеальные условия. Вы подошли к лошади не с того бока - начали закупать оборудование и нажимать кнопки, а только потом озвучили требования ![]()
-1
Всё верно, IF 3 МГц + полоса 2МГц в каждую сторону 1–5 МГц → оцифровка 10 МГц минимум. В сёрфах 2 было 12МГц, в Sirf 3-4 16МГц. Информация получена окольными путями поэтому инфа < 146% ))
-1
Я могу пойти в чистое поле, поставить приёмник на штатив, сделать измерения… Но что мне с ними делать? У меня нет задачи, где такие измерения можно применить ![]() А вот задач, где нужно знать точные координаты подвижного объекта - наоборот много.
А вот задач, где нужно знать точные координаты подвижного объекта - наоборот много.
Да, это бы решило все проблемы, тем более, что одна из моих идей - использовать RTK, чтобы переодически сбрасывать ошибку, накопленную системой навигации с датчиками на колёсах и инерционными сенсорами. Если я всё-таки доделаю эту систему, то в теории, она может не только под мостом, но и на протяжении целого туннеля выдавать нормальный трек, пока GPS отдыхает. Но иногда всё же нужно, чтобы RTK просыпался, и вправлял эту систему на место. Вопрос лишь в том, как часто это будет происходить (пока что с этим всё совсем плохо, но тест на крыше ещё не проводился).
Вот если бы это работало ещё и в обратную сторону (сенсоры помогали разрешать AR), было бы всё как надо, и никаких STOP-AND-GO…
Другая моя идея - использовать RTK для квадрокоптера. Но похоже, про это придётся вообще забыть, ибо никакого dead reckoning к нему не приделать (разве что, optical flow сенсор, но они совсем плохо работают в городской обстановке). Постоять на месте квадрокоптер тоже не умеет (по крайней мере, ему это крайне сложно, особенно в ветренную погоду). Да и килограммовая антена тут уж точно будет не к месту.
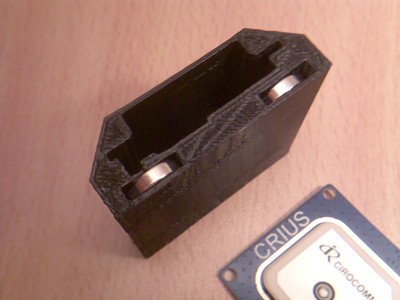
Сделал корпус с магнитным креплением на крышу. Фотки ниже.
Разобрался с NTRIP. В целом всё просто, сложность вызвал только mountpoint. Одна из страниц сбила с толку, там советовали юзать mountpoint EUREF01. А на самом деле, надо было всего лишь имя станции (SUR40).
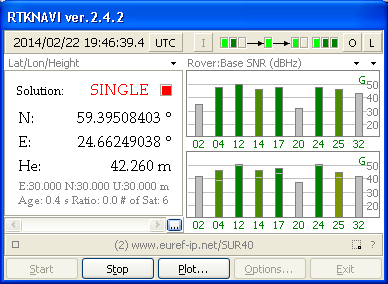
Итак, водрузил приёмник в центр крыши автомобиля, и встал в центре парковки (более открытого пространства не придумать).
Стою уже 10 минут. Судя по уровням сигнала, у меня антена ловит не намного хуже, чем у базы. Но решения нет даже флоат.
Попробую завтра с постпроцессингом чтоли…
ЗЫ. Корпус (материал - ABS пластик). Фоткал кофеваркой, т.к. телефон сломался.
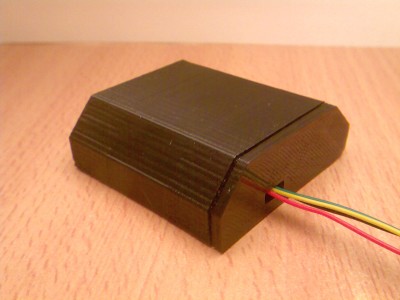



Жуть, отпечатанный корпус… напильник забыт и заброшен.
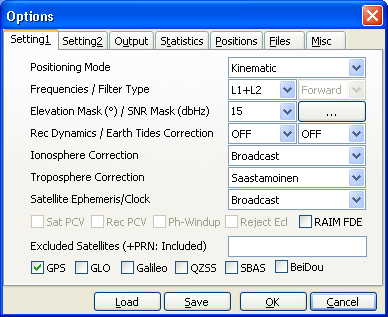
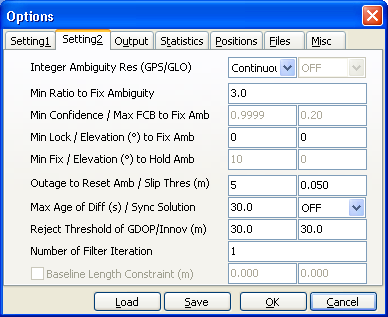
Скриншоты настрек можно? А то не должно при таких обстоятельствах быть single. Уровни совершенно нормальные.
Не очень понял этот комментарий. Разве напильником получилось бы лучше? ![]()
Нет, был конечно вариант отфрезеровать из аллюминия, как это я сделал с лазерной указкой, но боюсь, в таком корпусе приём сигнала точно будет никакой ![]() Да и возить металлический корпус по машине не очень хочется…
Да и возить металлический корпус по машине не очень хочется…
Координаты базы в positions какие проставлены?
Тут уже писали, что вещаться могут левые/сильно округленные, лучше вручную проставить.
Если кому интересно, новые файлы для анализа: http://svimik.com/rtk2.zip
Проехал тот же трек, но с антеной на крыше.
В архиве также есть base.log - это то, что выдавал NTRIP во время стоянки. Понять бы, почему с ним ничего не вышло…
Насчёт опции -c также есть вопросы. Я её убрал, чтобы посмотреть, как бы вёл себя RTK в реальном времени. С опцией -c получилось как и говорили, во время стоянки перед поездкой был fixed.
Когда -с убрал, получилось с точностью до наоборот - пока стоял на парковке, решение было float, отъехал - пошло fixed.
Кстати, во время езды почему-то прыгает между fixed и float, хотя я не останавливался… Как это объяснить?
Где б их взять тогда… Самому выяснять, поставив базу в роль ровера? ![]()
Позиции базы тут http://www.epncb.oma.be/_productsservices/coordinates/crd4station.php?station=SUR4
(чтобы ничего не считать, можно посмотреть последнюю таблицу, которая действительна сейчас).
Про корпус - ну лично я бы это выпилил из нескольких кусков оргстекла, например.
Настройки вроде похожи на правду. Но получается, что все же fixed и float решения получались, а не только single? Или это только в PPP-Kinematic они получились?
Если float/fixed дергается туда-сюда - это вообще нормально при таких условиях, потому как они плавают где-то на границе допустимого и совершенно непостоянны.
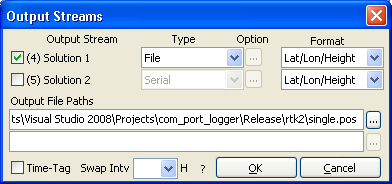
В построцессинге да, всё получается. Вопрос был в том, что не выходит в реальном времени с NTRIP - решения были только single.
Тогда, честно говоря, не знаю. Особенно при тех же настройках.
Вообще, не тех же. Постпроцессинг я делаю из командной строки (и всё работает), а когда пытаюсь юзать графический интерфейс - не работает ничего, и постпроцессинг тоже в тот раз не получилось.
Хм, может тогда входы-выходы какие перепутаны?
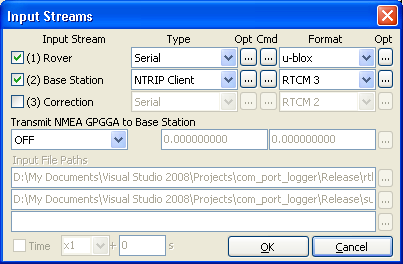
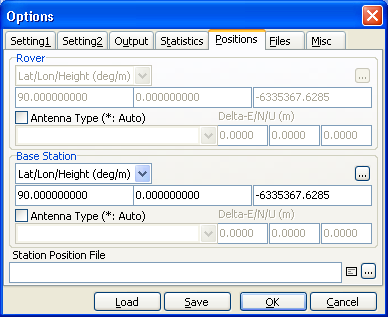
Последний скрин, координаты базы подставьте нормальные, я ссылку давал на них… Над полями ввода не забудьте выбрать ECEF вместо градусов.
А возможно ли на NEO-6M заставить работать DR? По аналогии как заставили его выдавать сырые измерения… ![]()
Хотя, в отличии от RAW сообщений, я не вижу, чтобы из DR функций было что-то заблокировано, все галочки без вопросов включаются… в чём подвох?
Насколько я вижу в описании протокола, приёмнику начиная с версии 7.01 можно скармливать RTCM 2.3 напрямую. Кто-нибудь пробовал?
Интересно, насколько это плохо… Или мой приёмник по определению не может принять что-то, что не видит EUREF станция?
Это становится проблемой только когда до станции несколько сотен километров, даже под тысячу, тогда созвездие может значительно отличаться. Если станция рядом - максимум будет отличаться на 1-2 спутника.
Я так понимаю, оно понимает только RTCM 2.3, а станция вещает 3.0. Есть готовые решения для конвертации 3.0 в 2.3?